PDF version (NAG web site
, 64-bit version, 64-bit version)
NAG Toolbox: nag_fit_1dspline_knots (e02ba)
Purpose
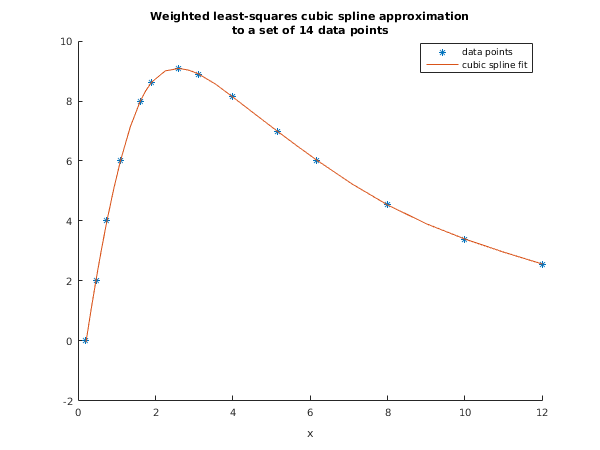
nag_fit_1dspline_knots (e02ba) computes a weighted least squares approximation to an arbitrary set of data points by a cubic spline with knots prescribed by you. Cubic spline interpolation can also be carried out.
Syntax
[
lamda,
c,
ss,
ifail] = e02ba(
x,
y,
w,
lamda, 'm',
m, 'ncap7',
ncap7)
[
lamda,
c,
ss,
ifail] = nag_fit_1dspline_knots(
x,
y,
w,
lamda, 'm',
m, 'ncap7',
ncap7)
Description
nag_fit_1dspline_knots (e02ba) determines a least squares cubic spline approximation to the set of data points with weights , for . The value of , where is the number of intervals of the spline (one greater than the number of interior knots), and the values of the knots , interior to the data interval, are prescribed by you.
has the property that it minimizes
, the sum of squares of the weighted residuals
, for
, where
The function produces this minimizing value of
and the coefficients
, where
, in the B-spline representation
Here
denotes the normalized B-spline of degree
defined upon the knots
.
In order to define the full set of B-splines required, eight additional knots and are inserted automatically by the function. The first four of these are set equal to the smallest and the last four to the largest .
The representation of in terms of B-splines is the most compact form possible in that only coefficients, in addition to the knots, fully define .
The method employed involves forming and then computing the least squares solution of a set of
linear equations in the coefficients
, for
. The equations are formed using a recurrence relation for B-splines that is unconditionally stable (see
Cox (1972) and
de Boor (1972)), even for multiple (coincident) knots. The least squares solution is also obtained in a stable manner by using orthogonal transformations, viz. a variant of Givens rotations (see
Gentleman (1974) and
Gentleman (1973)). This requires only one equation to be stored at a time. Full advantage is taken of the structure of the equations, there being at most four nonzero values of
for any value of
and hence at most four coefficients in each equation.
For further details of the algorithm and its use see
Cox (1974),
Cox (1975) and
Cox and Hayes (1973).
Subsequent evaluation of
from its B-spline representation may be carried out using
nag_fit_1dspline_eval (e02bb). If derivatives of
are also required,
nag_fit_1dspline_deriv (e02bc) may be used.
nag_fit_1dspline_integ (e02bd) can be used to compute the definite integral of
.
References
Cox M G (1972) The numerical evaluation of B-splines J. Inst. Math. Appl. 10 134–149
Cox M G (1974) A data-fitting package for the non-specialist user Software for Numerical Mathematics (ed D J Evans) Academic Press
Cox M G (1975) Numerical methods for the interpolation and approximation of data by spline functions PhD Thesis City University, London
Cox M G and Hayes J G (1973) Curve fitting: a guide and suite of algorithms for the non-specialist user NPL Report NAC26 National Physical Laboratory
de Boor C (1972) On calculating with B-splines J. Approx. Theory 6 50–62
Gentleman W M (1973) Least squares computations by Givens transformations without square roots J. Inst. Math. Applic. 12 329–336
Gentleman W M (1974) Algorithm AS 75. Basic procedures for large sparse or weighted linear least squares problems Appl. Statist. 23 448–454
Schoenberg I J and Whitney A (1953) On Polya frequency functions III Trans. Amer. Math. Soc. 74 246–259
Parameters
Compulsory Input Parameters
- 1:
– double array
-
The values
of the independent variable (abscissa), for .
Constraint:
.
- 2:
– double array
-
The values
of the dependent variable (ordinate), for .
- 3:
– double array
-
The values
of the weights, for
. For advice on the choice of weights, see the
E02 Chapter Introduction.
Constraint:
, for .
- 4:
– double array
-
must be set to the th (interior) knot, , for .
Constraint:
.
Optional Input Parameters
- 1:
– int64int32nag_int scalar
-
Default:
the dimension of the arrays
x,
y,
w. (An error is raised if these dimensions are not equal.)
The number of data points.
Constraint:
, where is the number of distinct values in the data.
- 2:
– int64int32nag_int scalar
-
Default:
the dimension of the array
lamda.
, where is the number of intervals of the spline (which is one greater than the number of interior knots, i.e., the knots strictly within the range to ) over which the spline is defined.
Constraint:
, where is the number of distinct values in the data.
Output Parameters
- 1:
– double array
-
The input values are unchanged, and
, for
,
,
,
,
ncap7 contains the additional (exterior) knots introduced by the function. For advice on the choice of knots, see
Cubic Spline Curves in the E02 Chapter Introduction.
- 2:
– double array
-
The coefficient
of the B-spline , for . The remaining elements of the array are not used.
- 3:
– double scalar
-
The residual sum of squares, .
- 4:
– int64int32nag_int scalar
unless the function detects an error (see
Error Indicators and Warnings).
Error Indicators and Warnings
Errors or warnings detected by the function:
-
-
The knots fail to satisfy the condition
.
Thus the knots are not in correct order or are not interior to the data interval.
-
-
The weights are not all strictly positive.
-
-
The values of , for , are not in nondecreasing order.
-
-
(so the number of interior knots is negative) or , where is the number of distinct values in the data (so there cannot be a unique solution).
-
-
The conditions specified by
Schoenberg and Whitney (1953) fail to hold for at least one subset of the distinct data abscissae. That is, there is no subset of
strictly increasing values,
, among the abscissae such that
- ,
- ,
- .
This means that there is no unique solution: there are regions containing too many knots compared with the number of data points.
-
An unexpected error has been triggered by this routine. Please
contact
NAG.
-
Your licence key may have expired or may not have been installed correctly.
-
Dynamic memory allocation failed.
Accuracy
The rounding errors committed are such that the computed coefficients are exact for a slightly perturbed set of ordinates
. The ratio of the root-mean-square value for the
to the root-mean-square value of the
can be expected to be less than a small multiple of
, where
is a condition number for the problem. Values of
for
–
practical datasets all proved to lie between
and
(see
Cox (1975)). (Note that for these datasets, replacing the coincident end knots at the end points
and
used in the function by various choices of non-coincident exterior knots gave values of
between
and
. Again see
Cox (1975) for further details.) In general we would not expect
to be large unless the choice of knots results in near-violation of the Schoenberg–Whitney conditions.
A cubic spline which adequately fits the data and is free from spurious oscillations is more likely to be obtained if the knots are chosen to be grouped more closely in regions where the function (underlying the data) or its derivatives change more rapidly than elsewhere.
Further Comments
The time taken is approximately seconds, where is a machine-dependent constant.
Multiple knots are permitted as long as their multiplicity does not exceed
, i.e., the complete set of knots must satisfy
, for
, (see
Error Indicators and Warnings). At a knot of multiplicity one (the usual case),
and its first two derivatives are continuous. At a knot of multiplicity two,
and its first derivative are continuous. At a knot of multiplicity three,
is continuous, and at a knot of multiplicity four,
is generally discontinuous.
The function can be used efficiently for cubic spline interpolation, i.e., if . The abscissae must then of course satisfy . Recommended values for the knots in this case are , for .
Example
Determine a weighted least squares cubic spline approximation with five intervals (four interior knots) to a set of given data points. Tabulate the data and the corresponding values of the approximating spline, together with the residual errors, and also the values of the approximating spline at points half-way between each pair of adjacent data points.
The example program is written in a general form that will enable a cubic spline approximation with
intervals (
interior knots) to be obtained to
data points, with arbitrary positive weights, and the approximation to be tabulated. Note that
nag_fit_1dspline_eval (e02bb) is used to evaluate the approximating spline. The program is self-starting in that any number of datasets can be supplied.
Open in the MATLAB editor:
e02ba_example
function e02ba_example
fprintf('e02ba example results\n\n');
m = 14;
data = [ 0.20 0.00 0.2;
0.47 2.00 0.2;
0.74 4.00 0.3;
1.09 6.00 0.7;
1.60 8.00 0.9;
1.90 8.62 1.0;
2.60 9.10 1.0;
3.10 8.90 1.0;
4.00 8.15 0.8;
5.15 7.00 0.5;
6.17 6.00 0.7;
8.00 4.54 1.0;
10.00 3.39 1.0;
12.00 2.56 1.0];
x = data(:,1);
y = data(:,2);
w = data(:,3);
knots = [1.5 2.6 4 8];
nbar = size(knots,2) + 1;
ncap7 = nbar + 7;
lamda = zeros(ncap7,1);
lamda(5:nbar+3) = knots;
[lamda, c, ss, ifail] = e02ba( ...
x, y, w, lamda);
fprintf('\n j lamda(j+2) b-spline coeff c(j)\n\n');
fprintf('%3d%35.4f\n', 1, c(1));
for j = 2:nbar+2
fprintf('%3d%15.4f%20.4f\n',j,lamda(j+2),c(j));
end
fprintf('%3d%35.4f\n', nbar+3, c(nbar+3));
fprintf('\nResidual sum of squares = %12.2e\n\n', ss)
fprintf('Cubic spline approximation and residuals\n\n');
fprintf(' x w y Fit Residual\n');
k = 0;
for i = 1:m
k = k + 1;
xp(k) = x(i);
[fit(k), ifail] = e02bb( ...
lamda, c, x(i));
fprintf('%11.4f%11.4f%11.4f%11.4f%11.2e\n', ...
x(i), w(i), y(i), fit(k), fit(k)-y(i));
if i<m
xh = (x(i)+x(i+1))/2;
k = k + 1;
xp(k) = xh;
[fit(k), ifail] = e02bb( ...
lamda, c, xh);
fprintf('%11.4f%33.4f\n',xh, fit(k))
end
end
fig1 = figure;
hold on
plot(x,y,'*')
plot(xp,fit);
xlabel('x');
title({'Weighted least-squares cubic spline approximation', ...
'to a set of 14 data points'});
legend('data points','cubic spline fit');
hold off;
e02ba example results
j lamda(j+2) b-spline coeff c(j)
1 -0.0465
2 0.2000 3.6150
3 1.5000 8.5724
4 2.6000 9.4261
5 4.0000 7.2716
6 8.0000 4.1207
7 12.0000 3.0822
8 2.5597
Residual sum of squares = 1.78e-03
Cubic spline approximation and residuals
x w y Fit Residual
0.2000 0.2000 0.0000 -0.0465 -4.65e-02
0.3350 1.0622
0.4700 0.2000 2.0000 2.1057 1.06e-01
0.6050 3.0817
0.7400 0.3000 4.0000 3.9880 -1.20e-02
0.9150 5.0558
1.0900 0.7000 6.0000 5.9983 -1.73e-03
1.3450 7.1376
1.6000 0.9000 8.0000 7.9872 -1.28e-02
1.7500 8.3544
1.9000 1.0000 8.6200 8.6348 1.48e-02
2.2500 9.0076
2.6000 1.0000 9.1000 9.0896 -1.04e-02
2.8500 9.0353
3.1000 1.0000 8.9000 8.9125 1.25e-02
3.5500 8.5660
4.0000 0.8000 8.1500 8.1321 -1.79e-02
4.5750 7.5592
5.1500 0.5000 7.0000 6.9925 -7.53e-03
5.6600 6.5010
6.1700 0.7000 6.0000 6.0255 2.55e-02
7.0850 5.2292
8.0000 1.0000 4.5400 4.5315 -8.51e-03
9.0000 3.9045
10.0000 1.0000 3.3900 3.3928 2.76e-03
11.0000 2.9574
12.0000 1.0000 2.5600 2.5597 -3.45e-04
PDF version (NAG web site
, 64-bit version, 64-bit version)
© The Numerical Algorithms Group Ltd, Oxford, UK. 2009–2015