| At Mark 22: | nwkjac and njcpvt were removed from the interface; neq was made optional |
. . . [...] = d02nv(...); [...] = d02nt(...); [..., ifail] = d02nc(...); if (ifail ~= 1 and ifail < 14) [...] = d02ny(...); end . . .The linear algebra setup function nag_ode_ivp_stiff_bandjac_setup (d02nt) and one of the integrator setup functions, nag_ode_ivp_stiff_bdf (d02nv) or nag_ode_ivp_stiff_blend (d02nw), must be called prior to the call of nag_ode_ivp_stiff_exp_bandjac (d02nc). The integrator diagnostic function nag_ode_ivp_stiff_integ_diag (d02ny) may be called after the call to nag_ode_ivp_stiff_exp_bandjac (d02nc). There is also a function, nag_ode_ivp_stiff_contin (d02nz), designed to permit you to change step size on a continuation call to nag_ode_ivp_stiff_exp_bandjac (d02nc) without restarting the integration process.
Input Parameters
Output Parameters
Input Parameters
Output Parameters
for i = 1:neq j1 = max(i-ml,1); j2 = min(i+mu,neq); for j = j1:j2 k = min(ml+1-i,0)+j; p(k,i) = δr/δy(i,j); end endSee also nag_lapack_dgbtrf (f07bd).
Input Parameters
[errloc, ifail] = d02za(acor(1:neq,2), acor(1:neq,1)); % Check ifail before proceeding
Output Parameters
Cases prefixed with W are classified as warnings and do not generate an error of type NAG:error_n. See nag_issue_warnings.
Open in the MATLAB editor: d02nc_example
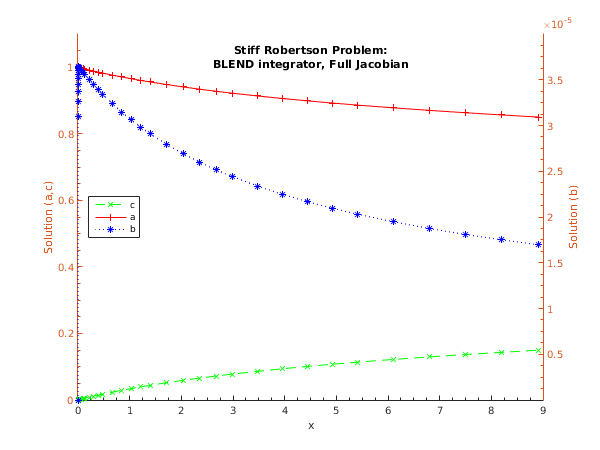
function d02nc_example fprintf('d02nc example results\n\n'); % For communication with monitr. global ncall ykeep tkeep % Initialize setup variables and arrays. neq = int64(3); neqmax = int64(neq); ml = int64(1); mu = int64(2); nwkjac = int64(neqmax*(2*ml+mu+1)); njcpvt = int64(neqmax); maxord = int64(11); sdysav = int64(maxord+3); maxstp = int64(200); mxhnil = int64(5); h0 = 0; hmax = 10; hmin = 1.0e-10; tcrit = 0; petzld = false; const = zeros(6, 1); rwork = zeros(50+4*neqmax, 1); % d02nw is a setup routine to be called prior to d02nc. [const, rwork, ifail] = d02nw(... neqmax, sdysav, maxord, const, tcrit, hmin, ... hmax, h0, maxstp, mxhnil, 'Average-L2', rwork); % d02nt is a setup routine to be called prior to d02nc. [rwork, ifail] = d02nt(... neq, neqmax, 'Analytic', ml, mu, nwkjac, njcpvt, rwork); % Initialize integration variables and arrays. inform(1:32) = int64(0); ysave = zeros(neq, sdysav); wkjac = zeros(nwkjac, 1); jacpvt(1:njcpvt) = int64(0); % First part. Integrate to tout = 5.0 with itask=1 (i.e. overshooting and % internal interpolation) using the blend method. % Employ scalar relative tolerance and a vector of absolute tolerances. t = 0.0; tout = 5.0; itask = int64(1); itrace = int64(0); y = [1; 0; 0]; itol = int64(2); rtol = [0.0001]; atol = [1e-07; 1e-08; 1e-07]; % Prepare to store results for plotting. This gets done in monitr. ncall = 1; tkeep(1) = t; ykeep(1:3,1) = y(1:3); % Output initial results. fprintf(' x y_1 y_2 y_3\n'); fprintf('%8.3f %8.5f %8.5f %8.5f\n', t, y); % The Jacobian is evaluated by jac, and a monitoring routine is provided. [t, y, ydot, rwork, inform, ysave, wkjac, jacpvt, ifail] = ... d02nc(t, tout, y, rwork, rtol, atol, itol, inform, @fcn, ysave, @jac, ... wkjac, jacpvt, @monitr, itask, itrace); % Output results. fprintf('%8.3f %8.5f %8.5f %8.5f\n', t, y); % Seconnd part: continue integration to tout = 10.0 with different stepsize. h = 0.7; [rwork, ifail] = d02nz(neqmax, tcrit, h, hmin, hmax, maxstp, mxhnil, rwork); % Set tout and call integration routine. tout = 10; [t, y, ydot, rwork, inform, ysave, wkjac, jacpvt, ifail] = ... d02nc(t, tout, y, rwork, rtol, atol, itol, inform, @fcn, ysave, @jac, ... wkjac, jacpvt, @monitr, itask, itrace); % Output results. fprintf('%8.3f %8.5f %8.5f %8.5f\n', t, y); % d02ny is an integrator diagnostic routine which can be called after d02nc. [hu, h, tcur, tolsf, nst, nre, nje, nqu, nq, niter, imxer, algequ, ... ifail] = d02ny(neq, neqmax, rwork, inform); % Output diagnostics. fprintf('\nDiagnostic information\n integration status:\n'); fprintf(' last and next step sizes = %8.5f, %8.5f\n',hu, h); fprintf(' integration stopped at x = %8.5f\n',tcur); fprintf(' algorithm statistics:\n'); fprintf(' number of time-steps and Newton iterations = %5d %5d\n',nst,niter); fprintf(' number of residual and jacobian evaluations = %5d %5d\n',nre,nje); fprintf(' order of method last used and next to use = %5d %5d\n',nqu,nq); fprintf(' component with largest error = %5d\n\n',imxer); % Plot results. fig1 = figure; display_plot(tkeep(1:ncall),ykeep(1:3,1:ncall)); function [f, ires] = fcn(neq, t, y, ires) % Evaluate derivative vector. f = zeros(3,1); f(1) = -0.04d0*y(1) + 1.0d4*y(2)*y(3); f(2) = 0.04d0*y(1) - 1.0d4*y(2)*y(3) - 3.0d7*y(2)*y(2); f(3) = 3.0d7*y(2)*y(2); function p = jac(neq, t, y, h, d, ml, mu, pIn) % Evaluate the Jacobian. p = zeros(ml+mu+1, neq); hxd = h*d; p(1,1) = -hxd*(-0.04d0) + 1; p(2,1) = -hxd*(1.0d4*y(3)); p(3,1) = -hxd*(1.0d4*y(2)); p(1,2) = -hxd*(0.04d0); p(2,2) = -hxd*(-1.0d4*y(3)-6.0d7*y(2)) + 1; p(3,2) = -hxd*(-1.0d4*y(2)); p(1,3) = -hxd*(6.0d7*y(2)); p(2,3) = -hxd*(0.0d0) + 1; function [hnext, y, imon, inln, hmin, hmax] = monitr(neq, neqmax, ... t, hlast, hnext, y, ydot, ysave, r, acor, imon, hmin, hmax, nqu) % For communication with main routine. global ncall tkeep ykeep % This example of a monitoring routine stores the current results if the % integration step was successful, and if the x value is in range. tend = 10.0; if (imon == 1 && t>0.001 && t<tend) ncall = ncall + 1; tkeep(ncall) = t; ykeep(1:3,ncall) = y(1:3); end % We have to assign a value to inln (whether it gets used or not). inln = int64(0); function display_plot(tkeep,ykeep) % Plot one of the curves and then add the other two. hline3 = plot(tkeep,ykeep(3,:)); hold on; [haxes, hline1, hline2] = plotyy(tkeep,ykeep(1,:), tkeep,ykeep(2,:)); % Set the axis limits and the tick specifications to beautify the plot. set(haxes(1), 'YLim', [0.0 1.1]); set(haxes(1), 'XMinorTick', 'on', 'YMinorTick', 'on'); set(haxes(1), 'YTick', [0.0 0.2 0.4 0.6 0.8 1.0]); set(haxes(2), 'YLim', [0.0 4e-5]); set(haxes(2), 'YMinorTick', 'on'); set(haxes(2), 'YTick', [0.5e-5:0.5e-5:3.5e-5]); set(haxes(1), 'XLim', [0 9]); set(haxes(2), 'XLim', [0 9]); set(gca, 'box', 'off'); % no ticks on opposite axes. % Add title. ht = title({'Stiff Robertson Problem:','BLEND integrator, Full Jacobian'}); set(ht,'Position',[4.5,0.99,0.0]); % Label the x axis, and both y axes. xlabel('x'); ylabel(haxes(1),'Solution (a,c)'); ylabel(haxes(2),'Solution (b)'); % Add a legend. legend('c','a','b','Location','West'); % Set some features of the lines. set(hline1, 'Marker', '+','Linestyle','-','Color','red'); set(hline2, 'Marker', '*','Linestyle',':','Color','blue'); set(hline3, 'Marker', 'x','Linestyle','--','Color','green'); hold off;
d02nc example results
x y_1 y_2 y_3
0.000 1.00000 0.00000 0.00000
5.000 0.89152 0.00002 0.10846
10.000 0.84137 0.00002 0.15861
Diagnostic information
integration status:
last and next step sizes = 1.12797, 1.12797
integration stopped at x = 10.03368
algorithm statistics:
number of time-steps and Newton iterations = 63 272
number of residual and jacobian evaluations = 274 14
order of method last used and next to use = 4 4
component with largest error = 3