A new interface to the Multi-level Coordinate Search (MCS) algorithm to integrate it to the NAG optimization modelling suite has been introduced. This new routine gives access to all of the suite facilities and uses the same interface as all compatible solvers, simplifying experimentation significantly.
this routine usesoptional parametersto define choices in the problem specification and in the details of the algorithm. If you wish to use default settings for all of the optional parameters, you need only read Sections 1 to 10 of this document. If, however, you wish to reset some or all of the settings please refer to Section 11 for a detailed description of the algorithm, and to Section 12 for a detailed description of the specification of the optional parameters.
e05jbf is designed to find the global minimum or maximum of an arbitrary function, subject to simple bound-constraints using a multi-level coordinate search method. Derivatives are not required, but convergence is only guaranteed if the objective function is continuous in a neighbourhood of a global optimum. It is not intended for large problems.
The initialization routine e05jafmust have been called before calling e05jbf.
e05jbf is designed to solve modestly sized global optimization problems having simple bound-constraints only; it finds the global optimum of a nonlinear function subject to a set of bound constraints on the variables. Without loss of generality, the problem is assumed to be stated in the following form:
where (the objective function) is a nonlinear scalar function (assumed to be continuous in a neighbourhood of a global minimum), and the bound vectors are elements of , where denotes the extended reals . Relational operators between vectors are interpreted elementwise.
The optional parameter Maximize should be set if you wish to solve maximization, rather than minimization, problems.
If certain bounds are not present, the associated elements of or can be set to special values that will be treated as or . See the description of the optional parameter Infinite Bound Size. Phrases in this document containing terms like ‘unbounded values’ should be understood to be taken relative to this optional parameter.
Fixing variables (that is, setting for some ) is allowed in e05jbf.
A typical excerpt from a routine calling e05jbf is:
where e05jdf sets the optional parameter and value specified in optstr.
The initialization routine e05jaf does not need to be called before each invocation of e05jbf. You should be aware that a call to the initialization routine will reset each optional parameter to its default value, and, if you are using repeatable randomized initialization lists (see the description of the argument iinit), the random state stored in
the array comm
will be destroyed.
You must supply a subroutine that evaluates ; derivatives are not required.
The method used by e05jbf is based on MCS, the Multi-level Coordinate Search method described in Huyer and Neumaier (1999), and the algorithm it uses is described in detail in Section 11.
4References
Huyer W and Neumaier A (1999) Global optimization by multi-level coordinate search Journal of Global Optimization14 331–355
5Arguments
1: – IntegerInput
On entry: , the number of variables.
Constraint:
.
2: – Subroutine, supplied by the user.External Procedure
objfun must evaluate the objective function for a specified -vector .
On entry: , the vector at which the objective function is to be evaluated.
3: – Real (Kind=nag_wp)Output
On exit: must be set to the value of the objective function at .
4: – IntegerInput
On entry: if then e05jbf is calling objfun for the first time. This argument setting allows you to save computation time if certain data must be read or calculated only once.
5: – Integer arrayUser Workspace
6: – Real (Kind=nag_wp) arrayUser Workspace
objfun is called with the arguments iuser and ruser as supplied to e05jbf. You should use the arrays iuser and ruser to supply information to objfun.
7: – IntegerOutput
On exit: must be set to a value describing the action to be taken by the solver on return from objfun. Specifically, if the value is negative the solution of the current problem will terminate immediately; otherwise, computations will continue.
objfun must either be a module subprogram USEd by, or declared as EXTERNAL in, the (sub)program from which e05jbf is called. Arguments denoted as Input must not be changed by this procedure.
Note:objfun should not return floating-point NaN (Not a Number) or infinity values, since these are not handled by e05jbf. If your code inadvertently does return any NaNs or infinities, e05jbf is likely to produce unexpected results.
3: – IntegerInput
On entry: indicates whether the facility for dealing with bounds of special forms is to be used. ibound must be set to one of the following values.
You will supply and individually.
There are no bounds on .
There are semi-infinite bounds .
There are constant bounds and .
Note that it only makes sense to fix any components of when .
Constraint:
, , or .
4: – IntegerInput
On entry: selects which initialization method to use.
Simple initialization (boundary and midpoint), with , and , , , for .
Simple initialization (off-boundary and midpoint), with , and , , , for .
Initialization using linesearches.
You are providing your own initialization list.
Generate a random initialization list.
For more information on methods , or see Section 11.1.
If ‘infinite’ values (as determined by the value of the optional parameter Infinite Bound Size) are detected by e05jbf when you are using a simple initialization method ( or ), a safeguarded initialization procedure will be attempted, to avoid overflow.
Suggested value:
.
Constraint:
, , , or .
5: – Real (Kind=nag_wp) arrayInput/Output
6: – Real (Kind=nag_wp) arrayInput/Output
On entry: is , the array of lower bounds. is , the array of upper bounds.
If , you must set
to and to , for . If a particular is to be unbounded below, the corresponding should be set to , where is the value of the optional parameter Infinite Bound Size. Similarly, if a particular is to be unbounded above, the corresponding should be set to .
If or , arrays bl and bu need not be set on input.
If , you must set to and to . The remaining elements of bl and bu will then be populated by these initial values.
On exit: unless or on exit, bl and bu are the actual arrays of bounds used by e05jbf.
Constraints:
if , , for ;
if , .
7: – IntegerInput
On entry: the second dimension of the array list as declared in the (sub)program from which e05jbf is called.
sdlist is, at least, the maximum over of the number of points in coordinate at which to split according to the initialization list list; that is, .
Internally, e05jbf uses list to determine sets of points along each coordinate direction to which it fits quadratic interpolants. Since fitting a quadratic requires at least three distinct points, this puts a lower bound on sdlist. Furthermore, in the case of initialization by linesearches () internal storage considerations require that sdlist be at least , but not all of this space may be used.
Constraints:
if , ;
if , ;
if , .
8: – Real (Kind=nag_wp) arrayInput/Output
On entry: this argument need not be set on entry if you wish to use one of the preset initialization methods ().
list is the ‘initialization list’: whenever a sub-box in the algorithm is split for the first time (either during the initialization procedure or later), for each non-fixed coordinate the split is done at the values , as well as at some adaptively chosen intermediate points. The array sections
, for , must be in ascending order with each entry being distinct. In this context, ‘distinct’ should be taken to mean relative to the safe-range parameter (see x02amf).
On exit: unless , or on exit, the actual initialization data used by e05jbf. If you wish to monitor the contents of list you are advised to do so solely through monit, not through the output value here.
Constraints:
if is not fixed,
is in ascending order with each entry being distinct, for ;
, for and .
9: – Integer arrayInput/Output
On entry: this argument need not be set on entry if you wish to use one of the preset initialization methods ().
numpts encodes the number of splitting points in each non-fixed dimension.
On exit: unless , or on exit, the actual initialization data used by e05jbf.
Constraints:
if is not fixed, ;
, for .
10: – Integer arrayInput/Output
On entry: this argument need not be set on entry if you wish to use one of the preset initialization methods ().
You must designate a point stored in list that you wish e05jbf to consider as an ‘initial point’ for the purposes of the splitting procedure. Call this initial point . The coordinates of correspond to a set of indices
, for , such that is stored in
, for . You must set
, for .
On exit: unless , or on exit, the actual initialization data used by e05jbf.
Constraint:
if is not fixed,
, for .
11: – Subroutine, supplied by the NAG Library or the user.External Procedure
monit may be used to monitor the optimization process. It is invoked upon every successful completion of the procedure in which a sub-box is considered for splitting. It will also be called just before e05jbf exits if that splitting procedure was not successful.
If no monitoring is required, monit may be the dummy monitoring routine e05jbk supplied by the NAG Library.
On entry: the cumulative number of calls to objfun.
3: – Real (Kind=nag_wp) arrayInput
On entry: the current best point.
4: – Integer arrayInput
On entry: an array of counters.
, the current number of sub-boxes.
, the cumulative number of calls to objfun made in local searches.
, the cumulative number of points used as start points for local searches.
, the cumulative number of sweeps through levels.
, the cumulative number of splits by initialization list.
, the current lowest level containing non-split boxes.
5: – IntegerInput
On entry: the maximum over of the number of points in coordinate at which to split according to the initialization list list. See also the description of the argument numpts.
6: – Real (Kind=nag_wp) arrayInput
On entry: the initialization list.
7: – Integer arrayInput
On entry: the number of points in each coordinate at which to split according to the initialization list list.
8: – Integer arrayInput
On entry: a pointer to the ‘initial point’ in list. Element is the column index in list of the th coordinate of the initial point.
9: – IntegerInput
On entry: the number of points in the ‘shopping basket’ xbaskt.
10: – Real (Kind=nag_wp) arrayInput
Note: the th candidate minimum has its th coordinate stored in
, for and .
On entry: the ‘shopping basket’ of candidate minima.
11: – Real (Kind=nag_wp) arrayInput
On entry: the array of lower bounds of the current search box.
12: – Real (Kind=nag_wp) arrayInput
On entry: the array of upper bounds of the current search box.
13: – IntegerInput
On entry: is set by e05jbf to indicate at what stage of the minimization monit was called.
This is the first time that monit has been called.
This is the first and last time monit will be called.
14: – Integer arrayUser Workspace
15: – Real (Kind=nag_wp) arrayUser Workspace
monit is called with the arguments iuser and ruser as supplied to e05jbf. You should use the arrays iuser and ruser to supply information to monit.
16: – IntegerOutput
On exit: must be set to a value describing the action to be taken by the solver on return from monit. Specifically, if the value is negative the solution of the current problem will terminate immediately; otherwise, computations will continue.
monit must either be a module subprogram USEd by, or declared as EXTERNAL in, the (sub)program from which e05jbf is called. Arguments denoted as Input must not be changed by this procedure.
12: – Real (Kind=nag_wp) arrayOutput
On exit: if , contains an estimate of the global optimum (see also Section 7).
On entry: the dimension of the array comm as declared in the (sub)program from which e05jbf is called.
Constraint:
.
16: – Integer arrayUser Workspace
17: – Real (Kind=nag_wp) arrayUser Workspace
iuser and ruser are not used by e05jbf, but are passed directly to objfun and monit and may be used to pass information to these routines.
18: – IntegerInput/Output
On entry: ifail must be set to , or to set behaviour on detection of an error; these values have no effect when no error is detected.
A value of causes the printing of an error message and program execution will be halted; otherwise program execution continues. A value of means that an error message is printed while a value of means that it is not.
If halting is not appropriate, the value or is recommended. If message printing is undesirable, then the value is recommended. Otherwise, the value is recommended. When the value or is used it is essential to test the value of ifail on exit.
On exit: unless the routine detects an error or a warning has been flagged (see Section 6).
e05jbf returns with if your termination criterion has been met: either a target value has been found to the required relative error (as determined by the values of the optional parameters Target Objective Value, Target Objective Error and Target Objective Safeguard), or the best function value was static for the number of sweeps through levels given by the optional parameter Static Limit. The latter criterion is the default.
6Error Indicators and Warnings
If on entry or , explanatory error messages are output on the current error message unit (as defined by x04aaf).
Errors or warnings detected by the routine:
Initialization routine e05jaf has not been called.
On entry, .
Constraint: .
A value of Splits Limit () smaller than was set: , .
On entry, .
Constraint: , , or .
On entry, or and , and .
Constraint: if then , for ; if then .
On entry, and .
Constraint: if then .
On entry, .
Constraint: , , , or .
On entry, and .
Constraint: if then .
On entry, and .
Constraint: if then .
On entry, .
Constraint: .
On entry, user-supplied , .
Constraint: if is not fixed then , for .
On entry, user-supplied , and .
Constraint: if is not fixed then , for .
On entry, user-supplied , , , and .
Constraint: if is not fixed then , for and .
On entry, user-supplied , , , and .
Constraint: if is not fixed then , for and .
On entry, user-supplied , .
Constraint: if is not fixed then , for .
On entry, user-supplied , and .
Constraint: if is not fixed then , for .
On entry, user-supplied section contained distinct elements, and : , , .
On entry, user-supplied section was not in ascending order: , .
The number of non-fixed variables .
Constraint: .
A finite initialization list could not be computed internally. Consider reformulating the bounds on the problem, try providing your own initialization list, use the randomization option () or vary the value of Infinite Bound Size.
The user-supplied initialization list contained infinite values, as determined by the optional parameter Infinite Bound Size.
The function evaluations limit was exceeded.
Approximately Function Evaluations Limit function calls have been made without your chosen termination criterion being satisfied.
User-supplied objective function requested termination.
An error occurred during initialization. It is likely that points from the initialization list are very close together. Try relaxing the bounds on the variables or use a different initialization method.
An error occurred during linesearching. It is likely that your objective function is badly scaled: try rescaling it. Also, try relaxing the bounds or use a different initialization method. If the problem persists, please contact NAG quoting error code .
An unexpected error has been triggered by this routine. Please
contact NAG.
See Section 7 in the Introduction to the NAG Library FL Interface for further information.
Your licence key may have expired or may not have been installed correctly.
See Section 8 in the Introduction to the NAG Library FL Interface for further information.
Dynamic memory allocation failed.
See Section 9 in the Introduction to the NAG Library FL Interface for further information.
7Accuracy
If on exit, then the vector returned in the array x is an estimate of the solution whose function value satisfies your termination criterion: the function value was static for Static Limit sweeps through levels, or
Background information to multithreading can be found in the Multithreading documentation.
e05jbf is threaded by NAG for parallel execution in multithreaded implementations of the NAG Library.
e05jbf makes calls to BLAS and/or LAPACK routines, which may be threaded within the vendor library used by this implementation. Consult the documentation for the vendor library for further information.
Please consult the X06 Chapter Introduction for information on how to control and interrogate the OpenMP environment used within this routine. Please also consult the Users' Note for your implementation for any additional implementation-specific information.
9Further Comments
For each invocation of e05jbf, local workspace arrays of fixed length are allocated internally. The total size of these arrays amounts to integer elements, where is the value of the optional parameter Splits Limit and is the number of non-fixed variables, and real elements. In addition, if you are using randomized initialization lists (see the description of the argument iinit), a further integer elements are allocated internally.
In order to keep track of the regions of the search space that have been visited while looking for a global optimum, e05jbf internally allocates arrays of increasing sizes depending on the difficulty of the problem. Two of the main factors that govern the amount allocated are the number of sub-boxes (call this quantity ) and the number of points in the ‘shopping basket’ (the argument nbaskt on entry to monit). Safe, pessimistic upper bounds on these two quantities are so large as to be impractical. In fact, the worst-case number of sub-boxes for even the most simple initialization list (when on entry to monit) grows like . Thus e05jbf does not attempt to estimate in advance the final values of or nbaskt for a given problem. There are a total of integer arrays and real arrays whose lengths depend on , and there are a total of integer arrays and real arrays whose lengths depend on nbaskt. e05jbf makes a fixed initial guess that the maximum number of sub-boxes required will be and that the maximum number of points in the ‘shopping basket’ will be . If ever a greater amount of sub-boxes or more room in the ‘shopping basket’ is required, e05jbf performs reallocation, usually doubling the size of the inadequately-sized arrays. Clearly this process requires periods where the original array and its extension exist in memory simultaneously, so that the data within can be copied, which compounds the complexity of e05jbf's memory usage. It is possible (although not likely) that if your problem is particularly difficult to solve, or of a large size (hundreds of variables), you may run out of memory.
One array that could be dynamically resized by e05jbf is the ‘shopping basket’ (xbaskt on entry to monit). If the initial attempt to allocate reals for this array fails, monit will not be called on exit from e05jbf.
e05jbf performs better if your problem is well-scaled. It is worth trying (by guesswork perhaps) to rescale the problem if necessary, as sensible scaling will reduce the difficulty of the optimization problem, so that e05jbf will take less computer time.
10Example
This example finds the global minimum of the ‘peaks’ function in two dimensions
on the box .
The function has several local minima and one global minimum in the given box. The global minimum is approximately located at , where the function value is approximately .
We use default values for all the optional parameters, and we instruct e05jbf to use the simple initialization list corresponding to . In particular, this will set for us the initial point
(see Section 10.3).
Note: the remainder of this document is intended for more advanced users. Section 11 contains a detailed description of the algorithm. This information may be needed in order to understand Section 12, which describes the optional parameters that can be set by calls to e05jcf,e05jdf,e05jef,e05jffand/ore05jgf.
11Algorithmic Details
Here we summarise the main features of the MCS algorithm used in e05jbf, and we introduce some terminology used in the description of the subroutine and its arguments. We assume throughout that we will only do any work in coordinates in which is free to vary. The MCS algorithm is fully described in Huyer and Neumaier (1999).
11.1Initialization and Sweeps
Each sub-box is determined by a basepoint and an opposite point . We denote such a sub-box by . The basepoint is allowed to belong to more than one sub-box, is usually a boundary point, and is often a vertex.
An initialization procedure produces an initial set of sub-boxes. Whenever a sub-box is split along a coordinate for the first time (in the initialization procedure or later), the splitting is done at three or more user-defined values at which the objective function is sampled, and at some adaptively chosen intermediate points. At least four children are generated. More precisely, we assume that we are given
and a vector that, for each , locates within the th coordinate of an initial point ; that is, if for some , then . A good guess for the global optimum can be used as .
The initialization points and the vectors and are collectively called the initialization list (and sometimes we will refer to just the initialization points as ‘the initialization list’, whenever this causes no confusion). The initialization data may be input by you, or they can be set to sensible default values by e05jbf: if you provide them yourself, should contain , should contain , and should contain
, for and ; if you wish e05jbf to use one of its preset initialization methods, you could choose one of two simple, three-point methods (see Figure 1). If the list generated by one of these methods contains infinite values, attempts are made to generate a safeguarded list using the function (which is also used during the splitting procedure, and is described in Section 11.2). If infinite values persist, e05jbf exits with . There is also the option to generate an initialization list with the aid of linesearches (by setting ). Starting with the absolutely smallest point in the root box, linesearches are made along each coordinate. For each coordinate, the local minimizers found by the linesearches are put into the initialization list. If there were fewer than three minimizers, they are augmented by close-by values. The final preset initialization option () generates a randomized list, so that independent multiple runs may be made if you suspect a global optimum has not been found. Each call to the initialization routine e05jaf resets the initial-state vector for the Wichmann–Hill base-generator that is used. Depending on whether you set the optional parameter Repeatability to or , the random state is initialized to give a repeatable or non-repeatable sequence. Then, a random integer between and sdlist is selected, which is then used to determine the number of points to be generated in each coordinate; that is, numpts becomes a constant vector, set to this value. The components of list are then generated, from a uniform distribution on the root box if the box is finite, or else in a safeguarded fashion if any bound is infinite. The array is set to point to the best point in list.
Given an initialization list (preset or otherwise), e05jbf evaluates at , and sets the initial estimate of the global minimum, , to . Then, for , the objective function is evaluated at points that agree with in all but the th coordinate. We obtain pairs
, for , with: , say; with, for ,
and with
The point having the smallest function value is renamed and the procedure is repeated with the next coordinate.
Once e05jbf has a full set of initialization points and function values, it can generate an initial set of sub-boxes. Recall that the root box is , having basepoint . The opposite point is a corner of farthest away from , in some sense. The point need not be a vertex of , and is entitled to have infinite coordinates. We loop over each coordinate , splitting the current box along coordinate into , or sub-intervals with exactly one of the as endpoints, depending on whether two, one or none of the are on the boundary. Thus, as well as splitting at
, for , we split at additional points
, for . These additional are such that
where is the golden-section ratio , and the exponent takes the value or , chosen so that the sub-box with the smaller function value gets the larger fraction of the interval. Each child sub-box gets as basepoint the point obtained from by changing to the that is a boundary point of the corresponding th coordinate interval; this new basepoint, therefore, has function value . The opposite point is derived from by changing to the other end of that interval.
e05jbf can now rank the coordinates based on an estimated variability of . For each we compute the union of the ranges of the quadratic interpolant through any three consecutive , taking the difference between the upper and lower bounds obtained as a measure of the variability of in coordinate . A vector is populated in such a way that coordinate has the th highest estimated variability. For tiebreaks, when the obtained after splitting coordinate belongs to two sub-boxes, the one that contains the minimizer of the quadratic models is designated the current sub-box for coordinate .
Boxes are assigned levels in the following manner. The root box is given level . When a sub-box of level is split, the child with the smaller fraction of the golden-section split receives level ; all other children receive level . The box with the better function value is given the larger fraction of the splitting interval and the smaller level because then it is more likely to be split again more quickly. We see that after the initialization procedure the first level is empty and the non-split boxes have levels , so it is meaningful to choose much larger than . Note that the internal structure of e05jbf demands that be at least .
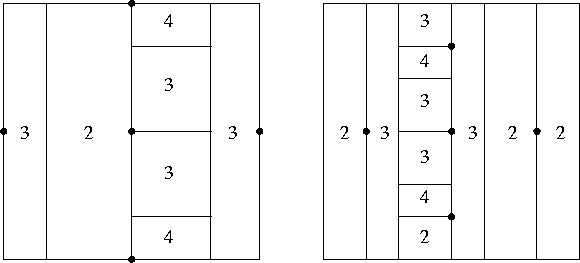
Examples of initializations in two dimensions are given in Figure 1. In both cases the initial point is ; on the left the initialization points are
while on the right the points are
In Figure 1, basepoints and levels after initialization are displayed. Note that these initialization lists correspond to and , respectively.
Figure 1: Examples of the initialization procedure
After initialization, a series of sweeps through levels is begun. A sweep is defined by three steps:
(i)scan the list of non-split sub-boxes. Fill a record list according to if there is no box at level , and with pointing to a sub-box with the lowest function value among all sub-boxes with level otherwise, for ;
(ii)the sub-box with label is a candidate for splitting. If the sub-box is not to be split, according to the rules described in Section 11.2, increase its level by and update if necessary. If the sub-box is split, mark it so, insert its children into the list of sub-boxes, and update if any child with level yields a strict improvement of over those sub-boxes at level ;
(iii)increment by . If then displaying monitoring information and start a new sweep; else if then repeat this step; else display monitoring information and go to the previous step.
Clearly, each sweep ends after at most visits of the third step.
11.2Splitting
Each sub-box is stored by e05jbf as a set of information about the history of the sub-box: the label of its parent, a label identifying which child of the parent it is, etc. Whenever a sub-box of level is a candidate for splitting, as described in Section 11.1, we recover , , and the number, , of times coordinate has been split in the history of . Sub-box could be split in one of two ways.
(i)Splitting by rank
If , the box is always split. The splitting index is set to a coordinate such that .
(ii)Splitting by expected gain
If , the sub-box could be split along a coordinate where a maximal gain in function value is expected. This gain is estimated according to a local separable quadratic model obtained by fitting to function values. If the expected gain is too small the sub-box is not split at all, and its level is increased by .
Eventually, a sub-box that is not eligible for splitting by expected gain will reach level and then be split by rank, as long as is large enough. As , the rule for splitting by rank ensures that each coordinate is split arbitrarily often.
Before describing the details of each splitting method, we introduce the procedure for correctly handling splitting at adaptive points and for dealing with unbounded intervals. Suppose we want to split the th coordinate interval , where we define , for and , and where is the basepoint of the sub-box being considered. The descendants of the sub-box should shrink sufficiently fast, so we should not split too close to . Moreover, if is large we want the new splitting value to not be too large, so we force it to belong to some smaller interval , determined by
where the function is defined by
11.2.1Splitting by rank
Consider a sub-box with level . Although the sub-box has reached a high level, there is at least one coordinate along which it has not been split very often. Among the such that for , select the splitting index to be the coordinate with the lowest (and hence highest variability rank). ‘Splitting by rank’ refers to the ranking of the coordinates by and .
If , so that has never been split along coordinate , the splitting is done according to the initialization list and the adaptively chosen golden-section split points, as described in Section 11.1. Also as covered there, new basepoints and opposite points are generated. The children having the smaller fraction of the golden-section split (that is, those with larger function values) are given level . All other children are given level .
Otherwise, ranges between and in the th coordinate direction. The splitting value is selected to be ; we are not attempting to split based on a large reduction in function value, merely in order to reduce the size of a large interval, so may not be optimal. Sub-box is split at and the golden-section split point, producing three parts and requiring only one additional function evaluation, at the point obtained from by changing the th coordinate to . The child with the smaller fraction of the golden-section split is given level , while the other two parts are given level . Basepoints are assigned as follows: the basepoint of the first child is taken to be , and the basepoint of the second and third children is the point . Opposite points are obtained by changing to the other end of the th coordinate-interval of the corresponding child.
11.2.2Splitting by expected gain
When a sub-box has level , we compute the optimal splitting index and splitting value from a local separable quadratic used as a simple local approximation of the objective function. To fit this curve, for each coordinate we need two additional points and their function values. Such data may be recoverable from the history of : whenever the th coordinate was split in the history of , we obtained values that can be used for the current quadratic interpolation in coordinate .
We loop over ; for each coordinate we pursue the history of back to the root box, and we take the first two points and function values we find, since these are expected to be closest to the current basepoint . If the current coordinate has not yet been split we use the initialization list. Then we generate a local separable model for by interpolation at and the additional points just collected:
We define the expected gain in function value when we evaluate at a new point obtained by changing coordinate in the basepoint, for each , based on two cases:
(i). We compute the expected gain as
Again, we split according to the initialization list, with the new basepoints and opposite points being as before.
(ii). Now, the th component of our sub-box ranges from to . Using the quadratic partial correction function
we can approximate the maximal gain expected when changing only. We will choose the splitting value from . We compute
and call the minimizer in .
If the expected best function value satisfies
(1)
where is the current best function value (including those function values obtained by local optimization), we expect the sub-box to contain a better point and so we split it, using as splitting index the component with minimal . Equation (1) prevents wasting function calls by avoiding splitting sub-boxes whose basepoints have bad function values. These sub-boxes will eventually be split by rank anyway.
We now have a splitting index and a splitting value . The sub-box is split at as long as , and at the golden-section split point; two or three children are produced. The larger fraction of the golden-section split receives level , while the smaller fraction receives level . If it is the case that and the third child is larger than the smaller of the two children from the golden-section split, the third child receives level . Otherwise it is given the level . The basepoint of the first child is set to , and the basepoint of the second (and third if it exists) is obtained by changing the th coordinate of to . The opposite points are again derived by changing to the other end of the th coordinate interval of .
If equation (1) does not hold, we expect no improvement. We do not split, and we increase the level of by .
11.3Local Search
The local optimization algorithm used by e05jbf uses linesearches along directions that are determined by minimizing quadratic models, all subject to bound constraints. Triples of vectors are computed using coordinate searches based on linesearches. These triples are used in triple search procedures to build local quadratic models for . A trust region-type approach to minimize these models is then carried out, and more information about the coordinate search and the triple search can be found in Huyer and Neumaier (1999).
The local search starts by looking for better points without being too local, by making a triple search using points found by a coordinate search. This yields a new point and function value, an approximation of the gradient of the objective, and an approximation of the Hessian of the objective. Then the quadratic model for is minimized over a small box, with the solution to that minimization problem then being used as a linesearch direction to minimize the objective. A measure is computed to quantify the predictive quality of the quadratic model.
The third stage is the checking of termination criteria. The local search will stop if more than visits to this part of the local search have occurred, where is the value of the optional parameter Local Searches Limit. If that is not the case, it will stop if the limit on function calls has been exceeded (see the description of the optional parameter Function Evaluations Limit). The final criterion checks if no improvement can be made to the function value, or whether the approximated gradient is small, in the sense that
The vector is the best point at the start of the current loop in this iterative local-search procedure, the constant is the value of the optional parameter Local Searches Tolerance, is the objective value at , and is the smallest function value found by the initialization procedure.
Next, e05jbf attempts to move away from the boundary, if any components of the current point lie there, using linesearches along the offending coordinates. Local searches are terminated if no improvement could be made.
The fifth stage carries out another triple search, but this time it does not use points from a coordinate search, rather points lying within the trust region box are taken.
The final stage modifies the trust region box to be bigger or smaller, depending on the quality of the quadratic model, minimizes the new quadratic model on that box, and does a linesearch in the direction of the minimizer. The value of is updated using the new data, and then we go back to the third stage (checking of termination criteria).
The Hessians of the quadratic models generated by the local search may not be positive definite, so e05jbf uses the general nonlinear optimizer e04vhf to minimize the models.
12Optional Parameters
Several optional parameters in e05jbf define choices in the problem specification or the algorithm logic. In order to reduce the number of formal arguments of e05jbf these optional parameters have associated default values that are appropriate for most problems. Therefore, you need only specify those optional parameters whose values are to be different from their default values.
The remainder of this section can be skipped if you wish to use the default values for all optional parameters.
The following is a list of the optional parameters available. A full description of each optional parameter is provided in Section 12.1.
Optional parameters may be specified by calling one, or more, of the routines e05jcf,e05jdf,e05jef,e05jffande05jgf before a call to e05jbf.
e05jcf reads options from an external options file, with Begin and End as the first and last lines respectively, and with each intermediate line defining a single optional parameter. For example,
Begin
Static Limit = 50
End
The call
Call e05jcf (iopts, comm, lcomm, ifail)
can then be used to read the file on
unit iopts. ifail will be zero
on successful exit. e05jcf should be consulted for a full description of this method of supplying optional parameters.
e05jdf,e05jef,e05jffore05jgf can be called to supply options directly, one call being necessary for each optional parameter. e05jdf,e05jef,e05jffore05jgf should be consulted for a full description of this method of supplying optional parameters.
All optional parameters not specified by you are set to their default values. Valid values of optional parameters specified by you are unaltered by e05jbf and so remain in effect for subsequent calls to e05jbf, unless you explicitly change them.
12.1Description of the Optional Parameters
For each option, we give a summary line, a description of the optional parameter and details of constraints.
The summary line contains:
a parameter value,
where the letters , and denote options that take character, integer and real values respectively, and where the letter denotes an option that takes an or value;
the default value, where the symbol is a generic notation for machine precision (see x02ajf), the symbol stands for the largest positive model number (see x02alf), represents the number of non-fixed variables, and the symbol stands for the maximum number of decimal digits that can be represented (see x02bef).
Option names are case-insensitive and must be provided in full; abbreviations are not recognized.
Defaults
This special keyword is used to reset all optional parameters to their default values, and any random state stored in the array comm will be destroyed.
Any option value given with this keyword will be ignored. This optional parameter cannot be queried or got.
Function Evaluations Limit
Default
This puts an approximate limit on the number of function calls allowed. The total number of calls made is checked at the top of an internal iteration loop, so it is possible that a few calls more than may be made.
Constraint:
.
Infinite Bound Size
Default
This defines the ‘infinite’ bound in the definition of the problem constraints. Any upper bound greater than or equal to will be regarded as (and similarly any lower bound less than or equal to will be regarded as ).
Constraint:
.
Local Searches
Default
If you want to try to accelerate convergence of e05jbf by starting local searches from candidate minima, you will require to be .
Constraint:
.
Local Searches Limit
Default
This defines the maximal number of iterations to be used in the trust region loop of the local-search procedure.
Constraint:
.
Local Searches Tolerance
Default
The value of is the multiplier used during local searches as a stopping criterion for when the approximated gradient is small, in the sense described in Section 11.3.
Constraint:
.
Minimize
Default
Maximize
These keywords specify the required direction of optimization. Any option value given with these keywords will be ignored.
Nolist
Default
List
Optional parameter List enables printing of each optional parameter specification as it is supplied. Nolist suppresses this printing.
Repeatability
Default
For use with random initialization lists (). When set to , an internally-initialized random state is stored in the array comm for use in subsequent calls to e05jbf.
Constraint:
.
Splits Limit
Default
Along with the initialization list list, this defines a limit on the number of times the root box will be split along any single coordinate direction. If Local Searches is you may find the default value to be too small.
Constraint:
.
Static Limit
Default
As the default termination criterion, computation stops when the best function value is static for sweeps through levels. This parameter is ignored if you have specified a target value to reach in Target Objective Value.
Constraint:
.
Target Objective Error
Default
If you have given a target objective value to reach in (the value of the optional parameter Target Objective Value), sets your desired relative error (from above if Minimize is set, from below if Maximize is set) between obj and , as described in Section 7. See also the description of the optional parameter Target Objective Safeguard.
Constraint:
.
Target Objective Safeguard
Default
If you have given a target objective value to reach in (the value of the optional parameter Target Objective Value), sets your desired safeguarded termination tolerance, for when is close to zero.
Constraint:
.
Target Objective Value
This parameter may be set if you wish e05jbf to use a specific value as the target function value to reach during the optimization. Setting overrides the default termination criterion determined by the optional parameter Static Limit.