NAG Library Function Document
nag_opt_nlp_solve (e04wdc)
Note: this function uses optional arguments to define choices in the problem specification and in the details of the algorithm. If you wish to use default
settings for all of the optional arguments, you need only read Sections 1 to 10 of this document. If, however, you wish to reset some or all of the settings please refer to Section 11 for a detailed description of the algorithm, to Section 12 for a detailed description of the specification of the optional arguments and to Section 13 for a detailed description of the monitoring information produced by the function.
1 Purpose
nag_opt_nlp_solve (e04wdc) is designed to minimize an arbitrary smooth function subject to constraints (which may include simple bounds on the variables, linear constraints and smooth nonlinear constraints) using a sequential quadratic programming (SQP) method. As many first derivatives as possible should be supplied by you; any unspecified derivatives are approximated by finite differences. It is not intended for large sparse problems.
nag_opt_nlp_solve (e04wdc) may also be used for unconstrained, bound-constrained and linearly constrained optimization.
nag_opt_nlp_solve (e04wdc) uses forward
communication for evaluating the objective function, the nonlinear constraint functions, and any of their derivatives.
The initialization function
nag_opt_nlp_init (e04wcc) must have been called before to calling nag_opt_nlp_solve (e04wdc).
2 Specification
| #include <nag.h> |
| #include <nage04.h> |
| void |
nag_opt_nlp_solve (Integer n,
Integer nclin,
Integer ncnln,
Integer tda,
Integer tdcj,
Integer tdh,
const double a[],
const double bl[],
const double bu[],
| void |
(*confun)(Integer *mode,
Integer ncnln,
Integer n,
Integer tdcj,
const Integer needc[],
const double x[],
double ccon[],
double cjac[],
Integer nstate,
Nag_Comm *comm),
|
|
Integer *majits,
Integer istate[],
double ccon[],
double cjac[],
double clamda[],
double *objf,
double grad[],
double h[],
double x[],
Nag_E04State *state,
Nag_Comm *comm,
NagError *fail) |
|
| #include <nag.h> |
| #include <nage04.h> |
| void |
nag_opt_nlp_init (Nag_E04State *state,
NagError *fail) |
|
3 Description
nag_opt_nlp_solve (e04wdc) is designed to solve nonlinear programming problems – the minimization of a smooth nonlinear function subject to a set of constraints on the variables. nag_opt_nlp_solve (e04wdc) is suitable for small dense problems. The problem is assumed to be stated in the following form:
where
(the
objective function) is a nonlinear scalar function,
is an
by
constant matrix, and
is an
-vector of nonlinear constraint functions. (The matrix
and the vector
may be empty.) The objective function and the constraint functions are assumed to be smooth, here meaning at least twice-continuously differentiable. (The method of nag_opt_nlp_solve (e04wdc) will usually solve
(1) if there are only isolated discontinuities away from the solution.) We also write
for the vector of combined functions:
Note that although the bounds on the variables could be included in the definition of the linear constraints, we prefer to distinguish between them for reasons of computational efficiency. For the same reason, the linear constraints should not be included in the definition of the nonlinear constraints. Upper and lower bounds are specified for all the variables and for all the constraints. An equality constraint on can be specified by setting . If certain bounds are not present, the associated elements of or can be set to special values that will be treated as or . (See the description of the optional argument .)
A typical invocation of nag_opt_nlp_solve (e04wdc) is:
nag_opt_nlp_init(&state, ...);
nag_opt_nlp_option_set_file(ispecs, &state, ...);
nag_opt_nlp_solve(n, nclin, ncnln, ...);
where
nag_opt_nlp_option_set_file (e04wec) reads
a file of optional definitions.
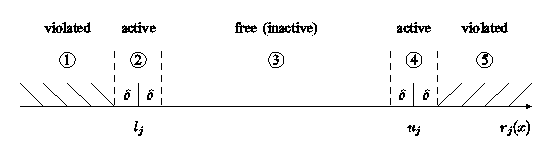
Figure 1 illustrates the feasible region for the
th pair of constraints
. The quantity of
is the
, which can be set by you (see
Section 12). The constraints
are considered ‘satisfied’ if
lies in Regions 2, 3 or 4, and ‘inactive’ if
lies in Region 3. The constraint
is considered ‘active’ in Region 2, and ‘violated’ in Region 1. Similarly,
is active in Region 4, and violated in Region 5. For equality constraints (
), Regions 2 and 4 are the same and Region 3 is empty.
Figure 1:
Illustration of the constraints
If there are no nonlinear constraints in
(1) and
is linear or quadratic, then it will generally be more efficient to use one of
nag_opt_lp (e04mfc),
nag_opt_lin_lsq (e04ncc) or
nag_opt_qp (e04nfc). If the problem is large and sparse and does have nonlinear constraints, then
nag_opt_sparse_nlp_solve (e04vhc) should be used, since nag_opt_nlp_solve (e04wdc) treats all matrices as dense.
You must supply an initial estimate of the solution to
(1), together with functions that define
and
with as many first partial derivatives as possible; unspecified derivatives are approximated by finite differences; see
Section 12.1 for a discussion of the optional argument
.
The objective function is defined by
objfun, and the nonlinear constraints are defined by
confun. Note that if there
are any nonlinear constraints then the
first call to
confun will precede the
first call to
objfun.
For maximum reliability, it is preferable for you to provide all partial derivatives (see Chapter 8 of
Gill et al. (1981), for a detailed discussion). If all gradients cannot be provided, it is similarly advisable to provide as many as possible. While developing
objfun and
confun, the optional argument
should be used to check the calculation of any known gradients.
The method used by nag_opt_nlp_solve (e04wdc) is based on NPOPT, which is part of the SNOPT package described in
Gill et al. (2005b), and the algorithm it uses is described in detail in
Section 11.
4 References
Eldersveld S K (1991) Large-scale sequential quadratic programming algorithms PhD Thesis Department of Operations Research, Stanford University, Stanford
Fourer R (1982) Solving staircase linear programs by the simplex method Math. Programming 23 274–313
Gill P E, Murray W and Saunders M A (2002) SNOPT: An SQP Algorithm for Large-scale Constrained Optimization 12 979–1006 SIAM J. Optim.
Gill P E, Murray W and Saunders M A (2005a) Users' guide for SQOPT 7: a Fortran package for large-scale linear and quadratic programming
Report NA 05-1 Department of Mathematics, University of California, San Diego
http://www.ccom.ucsd.edu/~peg/papers/sqdoc7.pdfGill P E, Murray W and Saunders M A (2005b) Users' guide for SNOPT 7.1: a Fortran package for large-scale linear nonlinear programming
Report NA 05-2 Department of Mathematics, University of California, San Diego
http://www.ccom.ucsd.edu/~peg/papers/sndoc7.pdfGill P E, Murray W, Saunders M A and Wright M H (1986) Users' guide for NPSOL (Version 4.0): a Fortran package for nonlinear programming Report SOL 86-2 Department of Operations Research, Stanford University
Gill P E, Murray W, Saunders M A and Wright M H (1992) Some theoretical properties of an augmented Lagrangian merit function Advances in Optimization and Parallel Computing (ed P M Pardalos) 101–128 North Holland
Gill P E, Murray W and Wright M H (1981) Practical Optimization Academic Press
Hock W and Schittkowski K (1981) Test Examples for Nonlinear Programming Codes. Lecture Notes in Economics and Mathematical Systems 187 Springer–Verlag
5 Arguments
- 1:
n – IntegerInput
On entry: , the number of variables.
Constraint:
.
- 2:
nclin – IntegerInput
On entry: , the number of general linear constraints.
Constraint:
.
- 3:
ncnln – IntegerInput
On entry: , the number of nonlinear constraints.
Constraint:
.
- 4:
tda – IntegerInput
-
On entry: the stride separating matrix column elements in the array
a.
Constraints:
- if ,
;
- otherwise .
- 5:
tdcj – IntegerInput
-
On entry: the stride separating matrix column elements in the array
cjac.
Constraints:
- if ,
;
- otherwise .
- 6:
tdh – IntegerInput
-
On entry: the stride separating matrix column elements in the array
h.
Constraint:
unless the optional argument
is in effect. If
is in effect, array
h is not referenced
- 7:
a[] – const doubleInput
-
Note: the dimension,
dim, of the array
a
must be at least
.
The th element of the matrix is stored in .
On entry: the
th row of
a contains the
th row of the matrix
of general linear constraints in
(1). That is, the
th row contains the coefficients of the
th general linear constraint, for
.
If
, the array
a is not referenced.
- 8:
bl[] – const doubleInput
- 9:
bu[] – const doubleInput
On entry:
bl must contain the lower bounds and
bu the upper bounds for all the constraints, in the following order. The first
elements of each array must contain the bounds on the variables, the next
elements the bounds for the general linear constraints (if any) and the next
elements the bounds for the general nonlinear constraints (if any). To specify a nonexistent lower bound (i.e.,
), set
, and to specify a nonexistent upper bound (i.e.,
), set
; where
is the optional argument
. To specify the
th constraint as an
equality, set
, say, where
.
Constraints:
- , for ;
- if , .
- 10:
confun – function, supplied by the userExternal Function
confun must calculate the vector
of nonlinear constraint functions and (optionally) its Jacobian,
, for a specified
-vector
. If there are no nonlinear constraints (i.e.,
), nag_opt_nlp_solve (e04wdc) will never call
confun, so it may be specified as NULLFN. If there are nonlinear constraints, the first call to
confun will occur before the first call to
objfun.
If all constraint gradients (Jacobian elements) are known (i.e.,
or
), any
constant elements may be assigned to
cjac once only at the start of the optimization. An element of
cjac that is not subsequently assigned in
confun will retain its initial value throughout. Constant elements may be loaded in
cjac during the first call to
confun (signalled by the value of
). The ability to preload constants is useful when many Jacobian elements are identically zero, in which case
cjac may be initialized to zero and nonzero elements may be reset by
confun.
It must be emphasized that, if
, unassigned elements of
cjac are
not treated as constant; they are estimated by finite differences, at nontrivial expense.
The specification of
confun is:
- 1:
mode – Integer *Input/Output
On entry: is set by nag_opt_nlp_solve (e04wdc) to indicate which values must be assigned during each call of
confun. Only the following values need be assigned, for each value of
such that
:
- The components of ccon corresponding to positive values in needc must be set. Other components and the array cjac are ignored.
- The known components of the rows of cjac corresponding to positive values in needc must be set. Other rows of cjac and the array ccon will be ignored.
- Only the elements of ccon corresponding to positive values of needc need to be set (and similarly for the known components of the rows of cjac).
On exit: may be used to indicate that you are unable or unwilling to evaluate the constraint functions at the current
.
During the linesearch, the constraint functions are evaluated at points of the form after they have already been evaluated satisfactorily at . At any such , if you set , nag_opt_nlp_solve (e04wdc) will evaluate the functions at some point closer to (where they are more likely to be defined).
If for some reason you wish to terminate the current problem, set .
- 2:
ncnln – IntegerInput
On entry: , the number of nonlinear constraints.
- 3:
n – IntegerInput
On entry: , the number of variables.
- 4:
tdcj – IntegerInput
-
On entry: the stride used in the array
cjac.
- 5:
needc[ncnln] – const IntegerInput
On entry: the indices of the elements of
ccon and/or
cjac that must be evaluated by
confun. If
, the
th element of
ccon and/or the available elements of the
th row of
cjac (see argument
mode) must be evaluated at
.
- 6:
x[n] – const doubleInput
On entry: , the vector of variables at which the constraint functions and/or the available elements of the constraint Jacobian are to be evaluated.
- 7:
ccon[] – doubleOutput
On exit: if
and
or
,
must contain the value of the
th constraint at
. The remaining elements of
ccon, corresponding to the non-positive elements of
needc, are ignored.
- 8:
cjac[] – doubleInput/Output
On entry: the elements of
cjac are set to special values that enable nag_opt_nlp_solve (e04wdc) to detect whether they are reset by
confun.
On exit: if
and
or
, the
th row of
cjac must contain the available elements of the vector
given by
where
is the partial derivative of the
th constraint with respect to the
th variable, evaluated at the point
. See also the argument
nstate. The remaining rows of
cjac, corresponding to non-positive elements of
needc, are ignored.
If all elements of the constraint Jacobian are known (i.e.,
or
), any constant elements may be assigned to
cjac one time only at the start of the optimization. An element of
cjac that is not subsequently assigned in
confun will retain its initial value throughout. Constant elements may be loaded into
cjac during the first call to
confun (signalled by the value
). The ability to preload constants is useful when many Jacobian elements are identically zero, in which case
cjac may be initialized to zero and nonzero elements may be reset by
confun.
Note that constant nonzero elements do affect the values of the constraints. Thus, if
is set to a constant value, it need not be reset in subsequent calls to
confun, but the value
must nonetheless be added to
. For example, if
and
then the term
must be included in the definition of
.
It must be emphasized that, if
or
, unassigned elements of
cjac are not treated as constant; they are estimated by finite differences, at nontrivial expense. If you do not supply a value for the optional argument
, an interval for each element of
is computed automatically at the start of the optimization. The automatic procedure can usually identify constant elements of
cjac, which are then computed once only by finite differences.
- 9:
nstate – IntegerInput
On entry: if
then nag_opt_nlp_solve (e04wdc) is calling
confun for the first time. This argument setting allows you to save computation time if certain data must be read or calculated only once.
- 10:
comm – Nag_Comm *
Pointer to structure of type Nag_Comm; the following members are relevant to
confun.
- user – double *
- iuser – Integer *
- p – Pointer
The type Pointer will be
void *. Before calling nag_opt_nlp_solve (e04wdc) you may allocate memory and initialize these pointers with various quantities for use by
confun when called from nag_opt_nlp_solve (e04wdc) (see
Section 3.2.1.1 in the Essential Introduction).
confun should be tested separately before being used in conjunction with nag_opt_nlp_solve (e04wdc). See also the description of the optional argument
.
- 11:
objfun – function, supplied by the userExternal Function
objfun must calculate the objective function
and (optionally) its gradient
for a specified
-vector
.
The specification of
objfun is:
- 1:
mode – Integer *Input/Output
On entry: is set by nag_opt_nlp_solve (e04wdc) to indicate which values must be assigned during each call of
objfun. Only the following values need be assigned:
- objf.
- All available elements of grad.
- objf and all available elements of grad.
On exit: may be used to indicate that you are unable or unwilling to evaluate the objective function at the current
.
During the linesearch, the function is evaluated at points of the form after they have already been evaluated satisfactorily at . For any such , if you set , nag_opt_nlp_solve (e04wdc) will reduce and evaluate the functions again (closer to , where they are more likely to be defined).
If for some reason you wish to terminate the current problem, set .
- 2:
n – IntegerInput
On entry: , the number of variables.
- 3:
x[n] – const doubleInput
On entry: , the vector of variables at which the objective function and/or all available elements of its gradient are to be evaluated.
- 4:
objf – double *Output
On exit: if
or
,
objf must be set to the value of the objective function at
.
- 5:
grad[n] – doubleInput/Output
On entry: the elements of
grad are set to special values.
On exit: if
or
,
grad must return the available elements of the gradient evaluated at
, i.e.,
contains the partial derivative
.
- 6:
nstate – IntegerInput
On entry: if
then nag_opt_nlp_solve (e04wdc) is calling
objfun for the first time. This argument setting allows you to save computation time if certain data must be read or calculated only once.
- 7:
comm – Nag_Comm *
Pointer to structure of type Nag_Comm; the following members are relevant to
objfun.
- user – double *
- iuser – Integer *
- p – Pointer
The type Pointer will be
void *. Before calling nag_opt_nlp_solve (e04wdc) you may allocate memory and initialize these pointers with various quantities for use by
objfun when called from nag_opt_nlp_solve (e04wdc) (see
Section 3.2.1.1 in the Essential Introduction).
objfun should be tested separately before being used in conjunction with nag_opt_nlp_solve (e04wdc). See also the description of the optional argument
.
- 12:
majits – Integer *Output
On exit: the number of major iterations performed.
- 13:
istate[] – IntegerInput/Output
On entry: is an integer array that need not be initialized if nag_opt_nlp_solve (e04wdc) is called with the
option (the default).
If optional argument
has been chosen, every element of
istate must be set. If nag_opt_nlp_solve (e04wdc) has just been called on a problem with the same dimensions,
istate already contains valid values. Otherwise,
should indicate whether either of the constraints
or
is expected to be active at a solution of
(1).
The ordering of
istate is the same as for
bl,
bu and
, i.e., the first
n components of
istate refer to the upper and lower bounds on the variables, the next
nclin refer to the bounds on
, and the last
ncnln refer to the bounds on
. Possible values of
follow:
| Neither nor is expected to be active. |
| is expected to be active. |
| is expected to be active. |
| This may be used if . Normally an equality constraint is active at a solution. |
The values
,
or
all have the same effect when
. If necessary, nag_opt_nlp_solve (e04wdc) will override your specification of
istate, so that a poor choice will not cause the algorithm to fail.
On exit: describes the status of the constraints
. For the
th lower or upper bound,
, the possible values of
are as follows (see
Figure 1).
is the appropriate feasibility tolerance.
| (Region 1) The lower bound is violated by more than . |
| (Region 5) The upper bound is violated by more than . |
| (Region 3) Both bounds are satisfied by more than . |
| (Region 2) The lower bound is active (to within ). |
| (Region 4) The upper bound is active (to within ). |
| () The bounds are equal and the equality constraint is satisfied (to within ). |
These values of
istate are labelled in the printed solution according to
Table 1.
| Region | | | | | | |
| | | | | | |
| Printed solution | -- | LL | FR | UL | ++ | EQ |
Table 1Labels used in the printed solution for the regions in
Figure 1 - 14:
ccon[] – doubleInput/Output
On entry:
ccon need not be initialized if the (default) optional argument
is used.
For a
, and if
,
ccon contains values of the nonlinear constraint functions
, for
, calculated in a previous call to nag_opt_nlp_solve (e04wdc).
On exit: if
,
contains the value of the
th nonlinear constraint function
at the final iterate, for
.
If
, the array
ccon is not referenced.
- 15:
cjac[] – doubleInput/Output
-
Note: the dimension,
dim, of the array
cjac
must be at least
.
On entry: in general,
cjac need not be initialized before the call to nag_opt_nlp_solve (e04wdc). However, if
or
, any constant elements of
cjac may be initialized. Such elements need not be reassigned on subsequent calls to
confun.
On exit: if
,
cjac contains the Jacobian matrix of the nonlinear constraint functions at the final iterate, i.e.,
contains the partial derivative of the
th constraint function with respect to the
th variable, for
and
. (See the discussion of argument
cjac under
confun.)
If
, the array
cjac is not referenced.
- 16:
clamda[] – doubleInput/Output
On entry: need not be set if the (default) optional argument
is used.
If the optional argument
has been chosen,
must contain a multiplier estimate for each nonlinear constraint, with a sign that matches the status of the constraint specified by the
istate array, for
. The remaining elements need not be set. If the
th constraint is defined as ‘inactive’ by the initial value of the
istate array (i.e.,
),
should be zero; if the
th constraint is an inequality active at its lower bound (i.e.,
),
should be non-negative; if the
th constraint is an inequality active at its upper bound (i.e.,
),
should be non-positive. If necessary, the function will modify
clamda to match these rules.
On exit: the values of the QP multipliers from the last QP subproblem. should be non-negative if and non-positive if .
- 17:
objf – double *Output
On exit: the value of the objective function at the final iterate.
- 18:
grad[n] – doubleOutput
On exit: the gradient of the objective function (or its finite difference approximation) at the final iterate.
- 19:
h[] – doubleInput/Output
-
Note: the dimension,
dim, of the array
h
must be at least
.
On entry:
h need not be initialized if the (default) optional argument
is used, and will be set to the identity.
If the optional argument
has been chosen,
h provides the initial approximation of the Hessian of the Lagrangian, i.e.,
, where
and
is an estimate of the Lagrange multipliers.
h must be a positive definite matrix.
On exit: contains the Hessian of the Lagrangian at the final estimate .
- 20:
x[n] – doubleInput/Output
On entry: an initial estimate of the solution.
On exit: the final estimate of the solution.
- 21:
state – Nag_E04State *Communication Structure
state contains internal information required for functions in this suite. It must not be modified in any way.
- 22:
comm – Nag_Comm *Communication Structure
-
The NAG communication argument (see
Section 3.2.1.1 in the Essential Introduction).
- 23:
fail – NagError *Input/Output
-
The NAG error argument (see
Section 3.6 in the Essential Introduction).
nag_opt_nlp_solve (e04wdc) returns with
NE_NOERROR if the iterates have converged to a point
that satisfies the first-order Kuhn–Tucker (see
Section 13.2) conditions to the accuracy requested by the
, i.e., the projected gradient and active constraint residuals are negligible at
.
You should check whether the following four conditions are satisfied:
| (i) |
the final value of rgNorm (see Section 13.2) is significantly less than that at the starting point; |
| (ii) |
during the final major iterations, the values of Step and Minors (see Section 13.1) are both one; |
| (iii) |
the last few values of both rgNorm and SumInf (see Section 13.2) become small at a fast linear rate; and |
| (iv) |
condHz (see Section 13.1) is small. |
If all these conditions hold,
is almost certainly a local minimum of
(1).
One caution about ‘Optimal solutions’. Some of the variables or slacks may lie outside their bounds more than desired, especially if scaling was requested. Max Primal infeas in the Print file refers to the largest bound infeasibility and which variable is involved. If it is too large, consider restarting with a smaller (say times smaller) and perhaps .
Similarly,
Max Dual infeas in the Print file indicates which variable is most likely to be at a nonoptimal value. Broadly speaking, if
then the objective function would probably change in the
th significant digit if optimization could be continued. If
seems too large, consider restarting with a smaller
.
Finally, Nonlinear constraint violn in the Print file shows the maximum infeasibility for nonlinear rows. If it seems too large, consider restarting with a smaller .
6 Error Indicators and Warnings
- NE_ALLOC_FAIL
-
Dynamic memory allocation failed.
Internal error: memory allocation failed when attempting to allocate workspace sizes and .
- NE_ALLOC_INSUFFICIENT
-
Internal memory allocation was insufficient. Please contact
NAG.
- NE_BAD_PARAM
-
Basis file dimensions do not match this problem.
On entry, argument had an illegal value.
- NE_BASIS_FAILURE
-
An error has occurred in the basis package, perhaps indicating incorrect setup of arrays. Set the optional argument and examine the output carefully for further information.
- NE_DERIV_ERRORS
-
User-supplied function computes incorrect constraint derivatives.
User-supplied function computes incorrect objective derivatives.
- NE_E04WCC_NOT_INIT
-
Initialization function
nag_opt_nlp_init (e04wcc) has not been called.
- NE_INT
-
On entry, .
Constraint: .
On entry, .
Constraint: .
On entry, .
Constraint: .
On entry, .
Constraint: .
On entry, .
Constraint: .
On entry, .
Constraint: .
- NE_INT_2
-
On entry, and .
Constraint: .
On entry, and .
Constraint: .
On entry, and .
Constraint: .
On entry, and .
Constraint: .
- NE_INT_3
-
On entry, , and .
Constraint: if ,
;
otherwise .
On entry, , and .
Constraint: if ,
;
otherwise .
- NE_INTERNAL_ERROR
-
An internal error has occurred in this function. Check the function call and any array sizes. If the call is correct then please contact
NAG for assistance.
An unexpected error has occurred. Set the optional argument and examine the output carefully for further information.
- NE_NOT_REQUIRED_ACC
-
The requested accuracy could not be achieved.
- NE_NUM_DIFFICULTIES
-
Numerical difficulties have been encountered and no further progress can be made.
- NE_REAL_2
-
On entry, bounds
bl and
bu for
are equal and infinite.
and
.
On entry, bounds for are inconsistent. and .
- NE_UNBOUNDED
-
The problem appears to be unbounded. The constraint violation limit has been reached.
The problem appears to be unbounded. The objective function is unbounded.
- NE_USER_STOP
-
User-supplied constraint function requested termination.
User-supplied objective function requested termination.
- NE_USRFUN_UNDEFINED
-
Unable to proceed into undefined region of user-supplied function.
User-supplied function is undefined at the first feasible point.
User-supplied function is undefined at the initial point.
- NW_LIMIT_REACHED
-
Iteration limit reached.
Major iteration limit reached.
The value of the optional argument is too small.
- NW_NOT_FEASIBLE
-
The linear constraints appear to be infeasible.
The problem appears to be infeasible. Infeasibilites have been minimized.
The problem appears to be infeasible. Nonlinear infeasibilites have been minimized.
The problem appears to be infeasible. The linear equality constraints could not be satisfied.
7 Accuracy
If
NE_NOERROR on exit, then the vector returned in the array
x is an estimate of the solution to an accuracy of approximately
.
8 Parallelism and Performance
nag_opt_nlp_solve (e04wdc) is not threaded by NAG in any implementation.
nag_opt_nlp_solve (e04wdc) makes calls to BLAS and/or LAPACK routines, which may be threaded within the vendor library used by this implementation. Consult the documentation for the vendor library for further information.
Please consult the
Users' Note for your implementation for any additional implementation-specific information.
This section describes the final output produced by nag_opt_nlp_solve (e04wdc). Intermediate and other output are given in
Section 13.
9.1 The Final Output
If
,
the final output, including a listing of the status of every variable and constraint will be sent to the
file descriptors
associated with
. The following describes the output for each variable. A full stop (.) is printed for any numerical value that is zero.
| Variable |
gives the name (Variable) and index , for , of the variable. |
| State |
gives the state of the variable (FR if neither bound is in the working set, EQ if a fixed variable, LL if on its lower bound, UL if on its upper bound, TF if temporarily fixed at its current value). If Value lies outside the upper or lower bounds by more than the , State will be ++ or -- respectively.
(The latter situation can occur only when there is no feasible point for the bounds and linear constraints.)
A key is sometimes printed before State.
| A |
Alternative optimum possible. The variable is active at one of its bounds, but its Lagrange multiplier is essentially zero. This means that if the variable were allowed to start moving away from its bound then there would be no change to the objective function. The values of the other free variables might change, giving a genuine alternative solution. However, if there are any degenerate variables (labelled D), the actual change might prove to be zero, since one of them could encounter a bound immediately. In either case the values of the Lagrange multipliers might also change.
|
| D |
Degenerate. The variable is free, but it is equal to (or very close to) one of its bounds.
|
| I |
Infeasible. The variable is currently violating one of its bounds by more than the .
|
|
| Value |
is the value of the variable at the final iteration.
|
| Lower bound |
is the lower bound specified for the variable. None indicates that . |
| Upper bound |
is the upper bound specified for the variable. None indicates that . |
| Lagr multiplier |
is the Lagrange multiplier for the associated bound. This will be zero if State is FR unless and , in which case the entry will be blank. If is optimal, the multiplier should be non-negative if State is LL and non-positive if State is UL. |
| Slack |
is the difference between the variable Value and the nearer of its (finite) bounds and . A blank entry indicates that the associated variable is not bounded (i.e., and ).
|
The meaning of the output for linear and nonlinear constraints is the same as that given above for variables, with
and
replaced by
and
respectively, and with the following changes in the heading:
| Linear constrnt |
gives the name (lincon) and index , for , of the linear constraint. |
| Nonlin constrnt |
gives the name (nlncon) and index (), for , of the nonlinear constraint. |
Note that movement off a constraint (as opposed to a variable moving away from its bound) can be interpreted as allowing the entry in the Slack column to become positive.
Numerical values are output with a fixed number of digits; they are not guaranteed to be accurate to this precision.
10 Example
This example is based on Problem 71 in
Hock and Schittkowski (1981) and involves the minimization of the nonlinear function
subject to the bounds
to the general linear constraint
and to the nonlinear constraints
The initial point, which is infeasible, is
with
.
The optimal solution (to five figures) is
and
. One bound constraint and both nonlinear constraints are active at the solution.
10.1 Program Text
Program Text (e04wdce.c)
10.2 Program Data
Program Data (e04wdce.d)
10.3 Program Results
Program Results (e04wdce.r)
Note: the remainder of this document is intended for more advanced users. Section 11 contains a detailed description of the algorithm which may be needed in order to understand Sections 12 and 13. Section 12 describes the optional arguments which may be set by calls to nag_opt_nlp_option_set_string (e04wfc), nag_opt_nlp_option_set_integer (e04wgc) and/or nag_opt_nlp_option_set_double (e04whc). Section 13 describes the quantities which can be requested to monitor the course of the computation.
11 Algorithmic Details
Here we summarise the main features of the SQP algorithm used in nag_opt_nlp_solve (e04wdc) and introduce some terminology used in the description of the function and its arguments. The SQP algorithm is fully described in
Gill et al. (2002).
11.1 Constraints and Slack Variables
The upper and lower bounds on the
components of
are said to define the
general constraints of the problem. nag_opt_nlp_solve (e04wdc) converts the general constraints to equalities by introducing a set of
slack variables . For example, the linear constraint
is replaced by
together with the bounded slack
. The minimization problem
(1) can therefore be written in the equivalent form
The general constraints become the equalities and , where and are the linear and nonlinear slacks.
11.2 Major Iterations
The basic structure of the SQP algorithm involves
major and
minor iterations. The major iterations generate a sequence of iterates
that satisfy the linear constraints and converge to a point that satisfies the nonlinear constraints and the first-order conditions for optimality. At each iterate
a QP subproblem is used to generate a search direction towards the next iterate
. The constraints of the subproblem are formed from the linear constraints
and the linearized constraint
where
denotes the
Jacobian matrix, whose elements are the first derivatives of
evaluated at
. The QP constraints therefore comprise the
linear constraints
where
and
are bounded above and below by
and
as before. If the
matrix
and
-vector
are defined as
then the QP subproblem can be written as
where
is a quadratic approximation to a modified Lagrangian function (see
Gill et al. (2002)). The matrix
is a quasi-Newton approximation to the Hessian of the Lagrangian. A BGFS update is applied after each major iteration. If some of the variables enter the Lagrangian linearly the Hessian will have some zero rows and columns. If the nonlinear variables appear first, then only the leading
rows and columns of the Hessian need to be approximated.
11.3 Minor Iterations
Solving the QP subproblem is itself an iterative procedure. Here, the iterations of the QP solver
nag_opt_sparse_convex_qp_solve (e04nqc) form the
minor iterations of the SQP method.
nag_opt_sparse_convex_qp_solve (e04nqc) uses a reduced-Hessian active-set method implemented as a reduced-gradient method. At each minor iteration, the constraints
are partitioned into the form
where the
basis matrix is square and nonsingular, and the matrices
and
are the remaining columns of
. The vectors
,
and
are the associated
basic,
superbasic and
nonbasic variables respectively; they are a permutation of the elements of
and
. At a QP subproblem, the basic and superbasic variables will lie somewhere between their bounds, while the nonbasic variables will normally be equal to one of their bounds. At each iteration,
is regarded as a set of independent variables that are free to move in any desired direction, namely one that will improve the value of the QP objective (or the sum of infeasibilities). The basic variables are then adjusted in order to ensure that
continues to satisfy
. The number of superbasic variables (
, say) therefore indicates the number of degrees of freedom remaining after the constraints have been satisfied. In broad terms,
is a measure of
how nonlinear the problem is. In particular,
will always be zero for LP problems.
If it appears that no improvement can be made with the current definition of , and , a nonbasic variable is selected to be added to , and the process is repeated with the value of increased by one. At all stages, if a basic or superbasic variable encounters one of its bounds, the variable is made nonbasic and the value of is decreased by one.
Associated with each of the equality constraints are the dual variables . Similarly, each variable in has an associated reduced gradient . The reduced gradients for the variables are the quantities , where is the gradient of the QP objective, and the reduced gradients for the slacks are the dual variables . The QP subproblem is optimal if for all nonbasic variables at their lower bounds, for all nonbasic variables at their upper bounds, and for other variables, including superbasics. In practice, an approximate QP solution is found by relaxing these conditions.
11.4 The Merit Function
After a QP subproblem has been solved, new estimates of the solution are computed using a linesearch on the augmented Lagrangian merit function
where
is a diagonal matrix of penalty arguments
, and
now refers to dual variables for the nonlinear constraints in
(1). If
denotes the current solution estimate and
denotes the QP solution, the linesearch determines a step
such that the new point
gives a
sufficient decrease in the merit function
. When necessary, the penalties in
are increased by the minimum-norm perturbation that ensures descent for
(see
Gill et al. (1992)). The value of
is adjusted to minimize the merit function as a function of
before the solution of the QP subproblem (see
Gill et al. (1986) and
Eldersveld (1991)).
11.5 Treatment of Constraint Infeasibilities
nag_opt_nlp_solve (e04wdc) makes explicit allowance for infeasible constraints. First, infeasible
linear constraints are detected by solving the linear program
where
is a vector of ones, and the nonlinear constraint bounds are temporarily excluded from
and
. This is equivalent to minimizing the sum of the general linear constraint violations subject to the bounds on
. (The sum is the
-norm of the linear constraint violations. In the linear programming literature, the approach is called
elastic programming.)
The linear constraints are infeasible if the optimal solution of
(10) has
or
. nag_opt_nlp_solve (e04wdc) then terminates without computing the nonlinear functions.
Otherwise, all subsequent iterates satisfy the linear constraints. (Such a strategy allows linear constraints to be used to define a region in which the functions can be safely evaluated.) nag_opt_nlp_solve (e04wdc) proceeds to solve nonlinear problems as given, using search directions obtained from the sequence of QP subproblems (see
(6)).
If a QP subproblem proves to be infeasible or unbounded (or if the dual variables
for the nonlinear constraints become large), nag_opt_nlp_solve (e04wdc) enters ‘elastic’ mode and thereafter solves the problem
where
is a non-negative argument (the
elastic weight), and
is called a
composite objective (the
penalty function for the nonlinear constraints).
The value of may increase automatically by multiples of if the optimal and continue to be nonzero. If is sufficiently large, this is equivalent to minimizing the sum of the nonlinear constraint violations subject to the linear constraints and bounds.
The initial value of is controlled by the optional argument .
12 Optional Arguments
Several optional arguments in nag_opt_nlp_solve (e04wdc) define choices in the problem specification or the algorithm logic. In order to reduce the number of formal arguments of nag_opt_nlp_solve (e04wdc) these optional arguments have associated default values that are appropriate for most problems. Therefore, you need only specify those optional arguments whose values are to be different from their default values.
The remainder of this section can be skipped if you wish to use the default values for all optional arguments.
The following is a list of the optional arguments available. A full description of each optional argument is provided in
Section 12.1.
Optional arguments may be specified by calling one, or more, of the functions
nag_opt_nlp_option_set_file (e04wec),
nag_opt_nlp_option_set_string (e04wfc) and
nag_opt_nlp_option_set_integer (e04wgc)
before a call to nag_opt_nlp_solve (e04wdc).
nag_opt_nlp_option_set_file (e04wec) reads options from an external options file, with
Begin and
End as the first and last lines respectively and each intermediate line defining a single optional argument. For example,
Begin
Print Level = 5
End
The call
nag_opt_nlp_option_set_file(ioptns, &state, &fail);
can then be used to read the file on
the descriptor
ioptns as returned by a call of
nag_open_file (x04acc).
NE_NOERROR
on successful exit.
nag_opt_nlp_option_set_file (e04wec) should be consulted for a full description of this method of supplying optional arguments.
All optional arguments not specified by you are set to their default values. Optional arguments specified by you are unaltered by nag_opt_nlp_solve (e04wdc) (unless they define invalid values) and so remain in effect for subsequent calls to nag_opt_nlp_solve (e04wdc), unless altered by you.
12.1 Description of the Optional Arguments
For each option, we give a summary line, a description of the optional argument and details of constraints.
The summary line contains:
- the keywords, where the minimum abbreviation of each keyword is underlined (if no characters of an optional qualifier are underlined, the qualifier may be omitted);
- a parameter value,
where the letters , denote options that take character, integer and real values respectively;
- the default value, where the symbol is a generic notation for machine precision (see nag_machine_precision (X02AJC)), and denotes the relative precision of the objective function , and signifies the value of .
Keywords and character values are case and white space insensitive.
Optional arguments used to specify files (e.g., optional arguments
and
) have type Nag_FileID (see
Section 3.2.1.1 in the Essential Introduction). This ID value must either be set to
(the default value) in which case there will be no output, or will be as returned by a call of
nag_open_file (x04acc).
| Central Difference Interval | | Default |
When , the central-difference interval is used near an optimal solution to obtain more accurate (but more expensive) estimates of gradients. Twice as many function evaluations are required compared to forward differencing. The interval used for the th variable is . The resulting derivative estimates should be accurate to , unless the functions are badly scaled.
If you supply a value for this optional parameter, a small value between and is appropriate.
| Check Frequency | | Default |
Every th minor iteration after the most recent basis factorization, a numerical test is made to see if the current solution satisfies the general linear constraints (the linear constraints and the linearized nonlinear constraints, if any). The constraints are of the form , where is the set of slack variables. To perform the numerical test, the residual vector is computed. If the largest component of is judged to be too large, the current basis is refactorized and the basic variables are recomputed to satisfy the general constraints more accurately. If , the value of is used and effectively no checks are made.
is useful for debugging purposes, but otherwise this option should not be needed.
This option controls the specification of the initial working set in the procedure for finding a feasible point for the linear constraints and bounds and in the first QP subproblem thereafter. With a , the first working set is chosen by nag_opt_nlp_solve (e04wdc) based on the values of the variables and constraints at the initial point. Broadly speaking, the initial working set will include equality constraints and bounds or inequality constraints that violate or ‘nearly’ satisfy their bounds (to within ).
With a
, you must set the
istate array and define
clamda and
h as discussed in
Section 5.
istate values associated with bounds and linear constraints determine the initial working set of the procedure to find a feasible point with respect to the bounds and linear constraints.
istate values associated with nonlinear constraints determine the initial working set of the first QP subproblem after such a feasible point has been found. nag_opt_nlp_solve (e04wdc) will override your specification of
istate if necessary, so that a poor choice of the working set will not cause a fatal error. For instance, any elements of
istate which are set to
,
will be reset to zero, as will any elements which are set to
when the corresponding elements of
bl and
bu are not equal. A warm start will be advantageous if a good estimate of the initial working set is available – for example, when nag_opt_nlp_solve (e04wdc) is called repeatedly to solve related problems.
| Crash Tolerance | | Default |
If a
is specified, an internal Crash procedure is used to select an initial basis from certain rows and columns of the constraint matrix
. The optional argument
determines which rows and columns of
are eligible initially, and how many times the Crash procedure is called. Columns of
are used to pad the basis where necessary.
|
Meaning |
|
The initial basis contains only slack variables: . |
|
The Crash procedure is called once, looking for a triangular basis in all rows and columns of . |
|
The Crash procedure is called twice (if there are nonlinear constraints). The first call looks for a triangular basis in linear rows, and the iteration proceeds with simplex iterations until the linear constraints are satisfied. The Jacobian is then evaluated for the first major iteration and the Crash procedure is called again to find a triangular basis in the nonlinear rows (retaining the current basis for linear rows). |
|
The Crash procedure is called up to three times (if there are nonlinear constraints). The first two calls treat linear equalities and linear inequalities separately. As before, the last call treats nonlinear rows before the first major iteration. |
If , certain slacks on inequality rows are selected for the basis first. (If , numerical values are used to exclude slacks that are close to a bound). The Crash procedure then makes several passes through the columns of , searching for a basis matrix that is essentially triangular. A column is assigned to ‘pivot’ on a particular row if the column contains a suitably large element in a row that has not yet been assigned. (The pivot elements ultimately form the diagonals of the triangular basis.) For remaining unassigned rows, slack variables are inserted to complete the basis.
The allows the starting Crash procedure to ignore certain ‘small’ nonzeros in each column of . If is the largest element in column , other nonzeros of in the columns are ignored if . (To be meaningful, must be in the range .)
When , the basis obtained by the Crash procedure may not be strictly triangular, but it is likely to be nonsingular and almost triangular. The intention is to obtain a starting basis containing more columns of and fewer (arbitrary) slacks. A feasible solution may be reached sooner on some problems.
For example, suppose the first columns of form the matrix shown under ; i.e., a tridiagonal matrix with entries , , . To help the Crash procedure choose all columns for the initial basis, we would specify a of for some value of .
This special keyword may be used to reset all optional arguments to their default values.
| Derivative Level | | Default |
Optional argument
specifies which nonlinear function gradients are known analytically and will be supplied to nag_opt_nlp_solve (e04wdc) by user-supplied functions
objfun and
confun.
|
Meaning |
|
All objective and constraint gradients are known. |
|
All constraint gradients are known, but some or all components of the objective gradient are unknown. |
|
The objective gradient is known, but some or all of the constraint gradients are unknown. |
|
Some components of the objective gradient are unknown and some of the constraint gradients are unknown. |
The value should be used whenever possible. It is the most reliable and will usually be the most efficient.
If
or
, nag_opt_nlp_solve (e04wdc) will
estimate the missing components of the objective gradient, using finite differences. This may simplify the coding of
objfun. However, it could increase the total run-time substantially (since a special call to
objfun is required for each missing element), and there is less assurance that an acceptable solution will be located. If the nonlinear variables are not well scaled, it may be necessary to specify a non-default optional argument
.
If
or
, nag_opt_nlp_solve (e04wdc) will estimate missing elements of the Jacobian. For each column of the Jacobian, one call to
confun is needed to estimate all missing elements in that column, if any.
At times, central differences are used rather than forward differences. (This is not under your control.)
| Derivative Linesearch | | Default |
At each major iteration a linesearch is used to improve the merit function. Optional argument uses safeguarded cubic interpolation and requires both function and gradient values to compute estimates of the step . If some analytic derivatives are not provided, or optional argument is specified, nag_opt_nlp_solve (e04wdc) employs a linesearch based upon safeguarded quadratic interpolation, which does not require gradient evaluations.
A nonderivative linesearch can be slightly less robust on difficult problems, and it is recommended that the default be used if the functions and derivatives can be computed at approximately the same cost. If the gradients are very expensive relative to the functions, a nonderivative linesearch may give a significant decrease in computation time.
If
is selected, nag_opt_nlp_solve (e04wdc) signals the evaluation of the linesearch by calling
objfun with
. If the potential saving provided by a nonderivative linesearch is to be realised, it is essential that
objfun be coded so that derivatives are not computed when
.
| Difference Interval | | Default |
This alters the interval
used to estimate gradients by forward differences. It does so in the following circumstances:
| – |
in the interval (‘cheap’) phase of verifying the problem derivatives; |
| – |
for verifying the problem derivatives; |
| – |
for estimating missing derivatives. |
In all cases, a derivative with respect to is estimated by perturbing that component of to the value , and then evaluating or at the perturbed point. The resulting gradient estimates should be accurate to unless the functions are badly scaled. Judicious alteration of may sometimes lead to greater accuracy.
If you supply a value for this optional parameter, a small value between and is appropriate.
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
Optional arguments
and
are similar to optional arguments
and
, but they record solution information in a manner that is more direct and more easily modified. A full description of information recorded in optional arguments
and
is given in
Gill et al. (2005a).
If , the last solution obtained will be output to the file associated with ID .
If , the file associated with ID ,
containing basis information, will be read. The file will usually have been output previously as a . The file will not be accessed if optional arguments or are specified.
| Elastic Weight | | Default |
This keyword determines the initial weight
associated with the problem
(11) (see
Section 11.5).
At major iteration , if elastic mode has not yet started, a scale factor is defined from the current objective gradient. Elastic mode is then started if the QP subproblem is infeasible, or the QP dual variables are larger in magnitude than . The QP is resolved in elastic mode with .
Thereafter, major iterations continue in elastic mode until they converge to a point that is optimal for
(11) (see
Section 11.5). If the point is feasible for equation
(1) , it is declared locally optimal. Otherwise,
is increased by a factor of
and major iterations continue. If
has already reached a maximum allowable value, equation
(1) is declared locally infeasible.
| Expand Frequency | | Default |
This option is part of the anti-cycling procedure designed to make progress even on highly degenerate problems.
For linear models, the strategy is to force a positive step at every iteration, at the expense of violating the bounds on the variables by a small amount. Suppose that the optional argument is . Over a period of iterations, the tolerance actually used by nag_opt_nlp_solve (e04wdc) increases from to (in steps of ).
For nonlinear models, the same procedure is used for iterations in which there is only one superbasic variable. (Cycling can occur only when the current solution is at a vertex of the feasible region.) Thus, zero steps are allowed if there is more than one superbasic variable, but otherwise positive steps are enforced.
Increasing helps reduce the number of slightly infeasible nonbasic variables (most of which are eliminated during a resetting procedure). However, it also diminishes the freedom to choose a large pivot element (see optional argument ).
| Factorization Frequency | | Default |
At most basis changes will occur between factorizations of the basis matrix.
With linear programs, the basis factors are usually updated every iteration. The default is reasonable for typical problems. Higher values up to (say) may be more efficient on well-scaled problems.
When the objective function is nonlinear, fewer basis updates will occur as an optimum is approached. The number of iterations between basis factorizations will therefore increase. During these iterations a test is made regularly (according to the optional argument ) to ensure that the general constraints are satisfied. If necessary the basis will be refactorized before the limit of updates is reached.
| Function Precision | | Default |
The relative function precision is intended to be a measure of the relative accuracy with which the functions can be computed. For example, if is computed as for some relevant and if the first significant digits are known to be correct, the appropriate value for would be .
(Ideally the functions or should have magnitude of order . If all functions are substantially less than in magnitude, should be the absolute precision. For example, if at some point and if the first significant digits are known to be correct, the appropriate value for would be .)
The default value of is appropriate for simple analytic functions.
In some cases the function values will be the result of extensive computation, possibly involving a costly iterative procedure that can provide few digits of precision. Specifying an appropriate may lead to savings, by allowing the linesearch procedure to terminate when the difference between function values along the search direction becomes as small as the absolute error in the values.
| Hessian Full Memory | | Default if |
| Hessian Limited Memory | | Default if |
These options select the method for storing and updating the approximate Hessian. (nag_opt_nlp_solve (e04wdc) uses a quasi-Newton approximation to the Hessian of the Lagrangian. A BFGS update is applied after each major iteration.)
If is specified, the approximate Hessian is treated as a dense matrix and the BFGS updates are applied explicitly. This option is most efficient when the number of variables is not too large (say, less than ). In this case, the storage requirement is fixed and one can expect -step Q-superlinear convergence to the solution.
should be used on problems where is very large. In this case a limited-memory procedure is used to update a diagonal Hessian approximation a limited number of times. (Updates are accumulated as a list of vector pairs. They are discarded at regular intervals after has been reset to their diagonal.)
| Hessian Frequency | | Default |
If optional argument is in effect and BFGS updates have already been carried out, the Hessian approximation is reset to the identity matrix. (For certain problems, occasional resets may improve convergence, but in general they should not be necessary.)
and have a similar effect to and (except that the latter retains the current diagonal during resets).
| Hessian Updates | | Default if , otherwise |
If optional argument is in effect and BFGS updates have already been carried out, all but the diagonal elements of the accumulated updates are discarded and the updating process starts again.
Broadly speaking, the more updates stored, the better the quality of the approximate Hessian. However, the more vectors stored, the greater the cost of each QP iteration. The default value is likely to give a robust algorithm without significant expense, but faster convergence can sometimes be obtained with significantly fewer updates (e.g., ).
| Infinite Bound Size | | Default |
If , defines the ‘infinite’ bound in the definition of the problem constraints. Any upper bound greater than or equal to will be regarded as (and similarly any lower bound less than or equal to will be regarded as ). If , the default value is used.
| Iterations Limit | | Default |
The value of specifies the maximum number of minor iterations allowed (i.e., iterations of the simplex method or the QP algorithm), summed over all major iterations. (See also the description of the optional argument .)
| Linesearch Tolerance | | Default |
This tolerance, , controls the accuracy with which a step length will be located along the direction of search each iteration. At the start of each linesearch a target directional derivative for the merit function is identified. This argument determines the accuracy to which this target value is approximated, and it must be a value in the range .
The default value requests just moderate accuracy in the linesearch.
If the nonlinear functions are cheap to evaluate, a more accurate search may be appropriate; try .
If the nonlinear functions are expensive to evaluate, a less accurate search may be appropriate. If all gradients are known, try . (The number of major iterations might increase, but the total number of function evaluations may decrease enough to compensate.)
If not all gradients are known, a moderately accurate search remains appropriate. Each search will require only –5 function values (typically), but many function calls will then be needed to estimate missing gradients for the next iteration.
For nag_opt_nlp_solve (e04wdc), normally each optional argument specification is printed as it is supplied. Optional argument may be used to suppress the printing and optional argument may be used to turn on printing.
| LU Density Tolerance | | Default |
| LU Singularity Tolerance | | Default |
The density tolerance, , is used during factorization of the basis matrix . Columns of and rows of are formed one at a time, and the remaining rows and columns of the basis are altered appropriately. At any stage, if the density of the remaining matrix exceeds , the Markowitz strategy for choosing pivots is terminated, and the remaining matrix is factored by a dense procedure. Raising the density tolerance towards may give slightly sparser factors, with a slight increase in factorization time.
The singularity tolerance, , helps guard against ill-conditioned basis matrices. After is refactorized, the diagonal elements of are tested as follows: if or , the th column of the basis is replaced by the corresponding slack variable. (This is most likely to occur after a restart.)
| LU Factor Tolerance | | Default |
| LU Update Tolerance | | Default |
The values of
and
affect the stability of the basis factorization
, during refactorization and updates respectively. The lower triangular matrix
is a product of matrices of the form
where the multipliers
will satisfy
. The default values of
and
usually strike a good compromise between stability and sparsity. They must satisfy
,
.
For large and relatively dense problems, (say) may give a useful improvement in stability without impairing sparsity to a serious degree.
For certain very regular structures (e.g., band matrices) it may be necessary to reduce
in order to achieve stability. For example, if the columns of
include a sub-matrix of the form
one should set both
and
to values in the range
.
| LU Partial Pivoting | | Default |
The factorization implements a Markowitz-type search for pivots that locally minimize the fill-in subject to a threshold pivoting stability criterion. The default option is to use threshhold partial pivoting. The optional arguments and are more expensive than partial pivoting but are more stable and better at revealing rank, as long as is not too large (say ). When numerical difficulties are encountered, nag_opt_nlp_solve (e04wdc) automatically reduces the tolerance towards and switches (if necessary) to rook or complete pivoting, before reverting to the default or specified options at the next refactorization (with , relevant messages are output to the ).
| Major Feasibility Tolerance | | Default |
This tolerance, , specifies how accurately the nonlinear constraints should be satisfied. The default value is appropriate when the linear and nonlinear constraints contain data to about that accuracy.
Let
be the maximum nonlinear constraint violation, normalized by the size of the solution, which is required to satisfy
where
is the violation of the
th nonlinear constraint
.
In the major iteration log (see
Section 13.2,
appears as the quantity labelled ‘Feasible’. If some of the problem functions are known to be of low accuracy, a larger
may be appropriate.
| Major Optimality Tolerance | | Default |
This tolerance,
, specifies the final accuracy of the dual variables. On successful termination, nag_opt_nlp_solve (e04wdc) will have computed a solution
such that
where
is an estimate of the complementarity slackness for variable
where
. The values
are computed from the final QP solution using the reduced gradients
(where
is the
th component of the objective gradient,
is the associated column of the constraint matrix
, and
is the set of QP dual variables):
In the , appears as the quantity labelled ‘Optimal’.
| Major Iterations Limit | | Default |
This is the maximum number of major iterations allowed. It is intended to guard against an excessive number of linearizations of the constraints. If , optimality and feasibility are checked.
| Major Print Level | | Default |
This controls the amount of output to the optional arguments and at each major iteration. suppresses most output, except for error messages. gives normal output for linear and nonlinear problems, and gives additional details of the Jacobian factorization that commences each major iteration.
In general, the value being specified may be thought of as a binary number of the form
where each letter stands for a digit that is either
or
as follows:
|
a single line that gives a summary of each major iteration. (This entry in is not strictly binary since the summary line is printed whenever ); |
|
basis statistics, i.e., information relating to the basis matrix whenever it is refactorized. (This output is always provided if ); |
|
, the nonlinear variables involved in the objective function or the constraints. These appear under the heading ‘Jacobian variables’; |
|
, the dual variables for the nonlinear constraints. These appear under the heading ‘Multiplier estimates’; |
|
, the values of the nonlinear constraint functions; |
|
, the Jacobian matrix. This appears under the heading ‘ and Jacobian’. |
To obtain output of any items , set the corresponding digit to , otherwise to .
If
, the Jacobian matrix will be output column-wise at the start of each major iteration. Column
will be preceded by the value of the corresponding variable
and a key to indicate whether the variable is basic, superbasic or nonbasic. (Hence if
, there is no reason to specify
unless the objective contains more nonlinear variables than the Jacobian.) A typical line of output is
3 1.250000e+01 BS 1 1.00000e+00 4 2.00000e+00
which would mean that
is basic at value
, and the third column of the Jacobian has elements of
and
in rows
and
.
| Major Step Limit | | Default |
This argument limits the change in
during a linesearch. It applies to all nonlinear problems, once a ‘feasible solution’ or ‘feasible subproblem’ has been found. A linesearch determines a step
over the range
, where
is
if there are nonlinear constraints, or is the step to the nearest upper or lower bound on
if all the constraints are linear. Normally, the first step length tried is
.
| 1. |
In some cases, such as or , even a moderate change in the components of can lead to floating-point overflow. The argument is therefore used to define a limit (where is the search direction), and the first evaluation of is at the potentially smaller step length . |
| 2. |
Wherever possible, upper and lower bounds on should be used to prevent evaluation of nonlinear functions at meaningless points. The optional argument provides an additional safeguard. The default value should not affect progress on well behaved problems, but setting may be helpful when rapidly varying functions are present. A ‘good’ starting point may be required. An important application is to the class of nonlinear least squares problems. |
| 3. |
In cases where several local optima exist, specifying a small value for may help locate an optimum near the starting point. |
The keywords and specify the required direction of optimization. It applies to both linear and nonlinear terms in the objective.
The keyword means ‘Ignore the objective function, while finding a feasible point for the linear and nonlinear constraints’. It can be used to check that the nonlinear constraints are feasible without altering the call to nag_opt_nlp_solve (e04wdc).
| Minor Feasibility Tolerance | | |
| Feasibility Tolerance | | Default |
nag_opt_nlp_solve (e04wdc) tries to ensure that all variables eventually satisfy their upper and lower bounds to within this tolerance, . This includes slack variables. Hence, general linear constraints should also be satisfied to within .
Feasibility with respect to nonlinear constraints is judged by the optional argument (not by ).
If the bounds and linear constraints cannot be satisfied to within , the problem is declared infeasible. If
the corresponding sum of infeasibilities
is quite small, it may be appropriate to raise by a factor of or . Otherwise, some error in the data should be suspected.
Nonlinear functions will be evaluated only at points that satisfy the bounds and linear constraints. If there are regions where a function is undefined, every attempt should be made to eliminate these regions from the problem.
For example, if , it is essential to place lower bounds on both variables. If , the bounds and might be appropriate. (The log singularity is more serious. In general, keep as far away from singularities as possible.)
If , feasibility is defined in terms of the scaled problem (since it is then more likely to be meaningful).
In reality, nag_opt_nlp_solve (e04wdc) uses as a feasibility tolerance for satisfying the bounds on and in each QP subproblem. If the sum of infeasibilities cannot be reduced to zero, the QP subproblem is declared infeasible. nag_opt_nlp_solve (e04wdc) is then in elastic mode thereafter (with only the linearized nonlinear constraints defined to be elastic). See the description of the optional argument .
| Minor Iterations Limit | | Default |
If the number of minor iterations for the optimality phase of the QP subproblem exceeds , then all nonbasic QP variables that have not yet moved are frozen at their current values and the reduced QP is solved to optimality.
Note that more than minor iterations may be necessary to solve the reduced QP to optimality. These extra iterations are necessary to ensure that the terminated point gives a suitable direction for the linesearch.
In the major iteration log (see
Section 13.2) a
t at the end of a line indicates that the corresponding QP was artificially terminated using the limit
.
Compare with the optional argument , which defines an independent absolute limit on the total number of minor iterations (summed over all QP subproblems).
| Minor Print Level | | Default |
This controls the amount of output to the
and the
during solution of the QP subproblems. The value of
has the following effect:
|
Output |
|
No minor iteration output except error messages. |
|
A single line of output at each minor iteration (controlled by optional arguments and . |
|
Basis factorization statistics generated during the periodic refactorization of the basis (see the optional argument ). Statistics for the first factorization each major iteration are controlled by the optional argument . |
| New Basis File | | Default |
| Backup Basis File | | Default |
| Save Frequency | | Default |
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
and are sometimes referred to as basis maps. They contain the most compact representation of the state of each variable. They are intended for restarting the solution of a problem at a point that was reached by an earlier run. For nontrivial problems, it is advisable to save basis maps at the end of a run, in order to restart the run if necessary.
If ,
a basis map will be saved on the
every th iteration. The first record of the file will contain the word PROCEEDING if the run is still in progress. A basis map will also be saved at the end of a run, with some other word indicating the final solution status.
If , it
is intended as a safeguard against losing the results of a long run. Suppose that a is being saved every () iterations, and that nag_opt_nlp_solve (e04wdc) is about to save such a basis at iteration . It is conceivable that the run may be interrupted during the next few milliseconds (in the middle of the save). In this case the Basis file will be corrupted and the run will have been essentially wasted.
To eliminate this risk, both a
and a
may be
specified using calls of
nag_open_file (x04acc).
The current basis will then be saved every iterations, first on the
and then immediately on the
.
If the run is interrupted at iteration during the save on the
,
there will still be a usable basis on the
(corresponding to iteration ).
Note that a new basis will be saved in at the end of a run if it terminates normally, but it will not be saved in . In the above example, if an optimum solution is found at iteration (or if the iteration limit is ), the final basis in the
will correspond to iteration , but the last basis saved in the
will be the one for iteration .
A full description of information recorded in
and
is given in
Gill et al. (2005a).
| New Superbasics Limit | | Default |
This option causes early termination of the QP subproblems if the number of free variables has increased significantly since the first feasible point. If the number of new superbasics is greater than , the nonbasic variables that have not yet moved are frozen and the resulting smaller QP is solved to optimality.
In the major iteration log (see
Section 13.1), a
t at the end of a line indicates that the QP was terminated early in this way.
| Old Basis File | | Default |
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
If
, the basis maps information will be obtained from the file associated with ID
.
The file will usually have been output previously as a
or
.
A full description of information recorded in
and
is given in
Gill et al. (2005a).
The file will not be acceptable if the number of rows or columns in the problem has been altered.
This argument is recommended for large problems that have significantly more variables than constraints. It reduces the work required for each ‘pricing’ operation (where a nonbasic variable is selected to become superbasic). When , all columns of the constraint matrix are searched. Otherwise, and are partitioned to give roughly equal segments and , for . If the previous pricing search was successful on and , the next search begins on the segments and . (All subscripts here are modulo .) If a reduced gradient is found that is larger than some dynamic tolerance, the variable with the largest such reduced gradient (of appropriate sign) is selected to become superbasic. If nothing is found, the search continues on the next segments and , and so on.
For time-stage models having time periods, (or or ) may be appropriate.
| Pivot Tolerance | | Default |
During the solution of QP subproblems, the pivot tolerance is used to prevent columns entering the basis if they would cause the basis to become almost singular.
When changes to for some search direction , a ‘ratio test’ determines which component of reaches an upper or lower bound first. The corresponding element of is called the pivot element. Elements of are ignored (and therefore cannot be pivot elements) if they are smaller than the pivot tolerance .
It is common for two or more variables to reach a bound at essentially the same time. In such cases, the (say, ) provides some freedom to maximize the pivot element and thereby improve numerical stability. Excessively small values of should therefore not be specified. To a lesser extent, the (say, ) also provides some freedom to maximize the pivot element. Excessively large values of should therefore not be specified.
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
If
,
the following information is output to a file associated with
ID
during the solution of each problem:
| – |
a listing of the optional arguments; |
| – |
some statistics about the problem; |
| – |
the amount of storage available for the factorization of the basis matrix; |
| – |
notes about the initial basis resulting from a Crash procedure or a Basis file; |
| – |
the iteration log; |
| – |
basis factorization statistics; |
| – |
the exit fail condition and some statistics about the solution obtained; |
| – |
the printed solution, if requested. |
These items are described in
Sections 9 and
13. Further brief output may be directed to the
.
| Print Frequency | | Default |
If , one line of the iteration log will be printed every th iteration. A value such as is suggested for those interested only in the final solution. If , the value of is used and effectively no checks are made.
| Proximal Point Method | | Default |
specifies minimization of or when the starting point is changed to satisfy the linear constraints (where refers to nonlinear variables).
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
The
from a previous run may be used as an
for a later run on the same problem. A full description of information recorded in
and
is given in
Gill et al. (2005a).
If , the final solution obtained will be output to the file associated with ID .
For linear programs, this format is compatible with various commercial systems.
If , the file associated with ID , containing basis information, will be read.
The file will usually have been output previously as a . The file will not be accessed if is specified.
Specifies the active-set algorithm used to solve subproblem
(11) (see
Section 11.5).
holds the full Cholesky factor
of the reduced Hessian
. As the QP iterations proceed, the dimension of
changes with the number of superbasic variables. If the number of superbasic variables needs to increase beyond the value of
, the reduced Hessian cannot be stored and the solver switches to
. The Cholesky solver is reactivated if the number of superbasics stabilizes at a value less than
.
solves the QP using a quasi-Newton method. In this case, is the factor of a quasi-Newton approximate Hessian.
uses an active-set method similar to , but uses the conjugate-gradient method to solve all systems involving the reduced Hessian.
The Cholesky QP solver is the most robust, but may require a significant amount of computation if there are many superbasics.
The quasi-Newton QP solver does not require computation of the exact
at the start of the subproblem in
(11). It may be appropriate when the number of superbasics is large but relatively few iterations are needed to reach a solution (e.g., if nag_opt_nlp_solve (e04wdc) is called with a Warm Start).
The conjugate-gradient QP solver is appropriate for problems with many degrees of freedom (say, more than superbasics).
| Reduced Hessian Dimension | | Default |
This specifies that an by triangular matrix (to define the reduced Hessian according to ) is to be available for use by the Cholesky QP solver.
| Scale Tolerance | | Default |
Three scale options are available as follows:
|
Meaning |
| 0 |
No scaling. This is recommended if it is known that and the constraint matrix never have very large elements (say, larger than ). |
| 1 |
The constraints and variables are scaled by an iterative procedure that attempts to make the matrix coefficients as close as possible to (see Fourer (1982)). This will sometimes improve the performance of the solution procedures. |
| 2 |
The constraints and variables are scaled by the iterative procedure. Also, a certain additional scaling is performed that may be helpful if the right-hand side or the solution is large. This takes into account columns of that are fixed or have positive lower bounds or negative upper bounds. |
Optional argument
affects how many passes might be needed through the constraint matrix. On each pass, the scaling procedure computes the ratio of the largest and smallest nonzero coefficients in each column:
If
is less than
times its previous value, another scaling pass is performed to adjust the row and column scales. Raising
from
to
(say) usually increases the number of scaling passes through
. At most
passes are made. The value of
should lie in the range
.
causes the row scales and column scales to be printed to , if has been specified. The scaled matrix coefficients are , and the scaled bounds on the variables and slacks are , , where if .
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
If , the final solution will be output to the file associated with ID .
To see more significant digits in the printed solution, it will sometimes be useful to
specify that the refers to the .
| Start Objective Check At Variable | | Default |
| Stop Objective Check At Variable | | Default |
| Start Constraint Check At Variable | | Default |
| Stop Constraint Check At Variable | | Default |
These keywords take effect only if
. They may be used to contol the verification of gradient elements computed by function
objfun and/or Jacobian elements computed by function
confun. For eample, if the first
elements of the objective gradient appeared to be correct in an earlier run, so that only element
remains questionable, it is reasonable to specify
. If the first
variables appear linearly in the objective, so that the corresponding gradient elements are constant, the above choice would also be appropriate.
| Summary Frequency | | Default |
(See
Section 3.2.1.1 in the Essential Introduction for further information on NAG data types.)
If
, a brief log will be output to the file associated with
,
including one line of information every
th iteration. In an interactive environment, it is useful to direct this output to the terminal, to allow a run to be monitored online. (If something looks wrong, the run can be manually terminated.) Further details are given in
Section 13.6.
| Superbasics Limit | | Default |
This option places a limit on the storage allocated for superbasic variables. Ideally, should be set slightly larger than the ‘number of degrees of freedom’ expected at an optimal solution.
For nonlinear problems, the number of degrees of freedom is often called the ‘number of independent variables’. Normally, need not be greater than , where is the number of nonlinear variables. For many problems, may be considerably smaller than . This will save storage if is very large.
Normally nag_opt_nlp_solve (e04wdc) prints the options file as it is being read, and then prints a complete list of the available keywords and their final values. The optional argument tells nag_opt_nlp_solve (e04wdc) not to print the full list.
| System Information No | | Default |
This option prints additional information on the progress of major and minor iterations, and Crash statistics. See
Section 13.
If , some timing information will be output to the Print file, if .
| Unbounded Objective | | Default |
| Unbounded Step Size | | Default |
These arguments are intended to detect unboundedness in nonlinear problems. During a linesearch,
is evaluated at points of the form
, where
and
are fixed and
varies. If
exceeds
or
exceeds
, iterations are terminated with the exit message
NE_UNBOUNDED.
If singularities are present, unboundedness in may be manifested by a floating-point overflow (during the evaluation of ), before the test against can be made.
Unboundedness in is best avoided by placing finite upper and lower bounds on the variables.
This option refers to finite difference checks on the derivatives computed by the user-supplied functions. Derivatives are checked at the first point that satisfies all bounds and linear constraints.
|
Meaning |
|
Only a ‘cheap’ test will be performed, requiring two calls to confun. |
|
Individual gradients will be checked (with a more reliable test). A key of the form OK or Bad? indicates whether or not each component appears to be correct. |
|
Individual columns of the problem Jacobian will be checked. |
|
Options 2 and 1 will both occur (in that order). |
|
Derivative checking is disabled. |
should be specified whenever a new
user
function is being developed. Missing derivatives are not checked, so they result in no overhead.
| Violation Limit | | Default |
This keyword defines an absolute limit on the magnitude of the maximum constraint violation,
, after the linesearch. On completion of the linesearch, the new iterate
satisfies the condition
where
is the point at which the nonlinear constraints are first evaluated and
is the
th nonlinear constraint violation
.
The effect of this violation limit is to restrict the iterates to lie in an expanded feasible region whose size depends on the magnitude of . This makes it possible to keep the iterates within a region where the objective is expected to be well defined and bounded below. If the obective is bounded below for all values of the variables, then may be any large positive value.
13 Description of Monitoring Information
nag_opt_nlp_solve (e04wdc) produces monitoring information, statistical information and information about the solution.
Section 9.1 contains the final output information sent to unit
. This section contains other output information.
13.1 Major Iteration Log
This section describes the output to unit
if
. One line of information is output every
th major iteration, where
is
.
| Label |
Description |
| Itns |
is the cumulative number of minor iterations. |
| Major |
is the current major iteration number. |
| Minors |
is the number of iterations required by both the feasibility and optimality phases of the QP subproblem. Generally, Minors will be in the later iterations, since theoretical analysis predicts that the correct active set will be identified near the solution (see Section 11). |
| Step |
is the step length taken along the current search direction . The variables have just been changed to . On reasonably well-behaved problems, the unit step will be taken as the solution is approached. |
| nCon or nObj |
nCon is the number of times confun has been called to evaluate the nonlinear problem functions. Evaluations needed for the estimation of the derivatives by finite differences are not included. nCon is printed as a guide to the amount of work required for the linesearch. If , the number of nonlinear constraints, is zero, nCon does not appear, but is replaced by nObj. This quantity is the number of calls made to objfun. |
| Feasible |
is the value of (see (12)), the maximum component of the scaled nonlinear constraint residual (see the description of the optional argument ). The solution is regarded as acceptably feasible if Feasible is less than the . In this case, the entry is contained in parentheses.
If the constraints are linear, all iterates are feasible and this entry is not printed. |
| Optimal |
is the value of (see (13)), the maximum complementary gap (see the description of the optional argument ). It is an estimate of the degree of nonoptimality of the reduced costs. Both Feasible and Optimal are small in the neighbourhood of a solution. |
| MeritFunction or Objective |
is the value of the augmented Lagrangian merit function (see (8)). This function will decrease at each iteration unless it was necessary to increase the penalty arguments (see Section 11.4). As the solution is approached, MeritFunction will converge to the value of the objective at the solution.
In elastic mode, the merit function is a composite function involving the constraint violations weighted by the elastic weight.
If the constraints are linear, this item is labelled Objective, the value of the objective function. It will decrease monotonically to its optimal value. |
| L+U |
is the number of nonzeros representing the basis factors and on completion of the QP subproblem.
If nonlinear constraints are present, the basis factorization is computed at the start of the first minor iteration. At this stage, , where lenL (see Section 13.4) is the number of subdiagonal elements in the columns of a lower triangular matrix and lenU (see Section 13.4) is the number of diagonal and superdiagonal elements in the rows of an upper-triangular matrix. As columns of are replaced during the minor iterations, L+U may fluctuate up or down but, in general, will tend to increase. As the solution is approached and the minor iterations decrease towards zero, L+U will reflect the number of nonzeros in the factors at the start of the QP subproblem.
If the constraints are linear, refactorization is subject only to the , and L+U will tend to increase between factorizations. |
| BSwap |
is the number of columns of the basis matrix that were swapped with columns of to improve the condition of . The swaps are determined by an factorization of the rectangular matrix with stability being favoured more than sparsity. |
| nS |
is the current number of superbasic variables. |
| condHz |
is an estimate of the condition number of , itself an estimate of , the reduced Hessian of the Lagrangian. The condition number is the square of the ratio of the largest and smallest diagonals of the upper triangular matrix , this being a lower bound on the condition number of . condHz gives a rough indication of whether or not the optimization procedure is having difficulty. If is the relative machine precision being used, the SQP algorithm will make slow progress if condHz becomes as large as , and will probably fail to find a better solution if condHz reaches .
To guard against high values of condHz, attention should be given to the scaling of the variables and the constraints. In some cases it may be necessary to add upper or lower bounds to certain variables to keep them a reasonable distance from singularities in the nonlinear functions or their derivatives. |
| Penalty |
is the Euclidean norm of the vector of penalty arguments used in the augmented Lagrangian merit function (not printed if there are no nonlinear constraints). |
The summary line may include additional code characters that indicate what happened during the course of the major iteration. These will follow the separator ‘_’ in the output.
| Label |
Description |
| c |
central differences have been used to compute the unknown components of the objective and constraint gradients. A switch to central differences is made if either the linesearch gives a small step, or is close to being optimal. In some cases, it may be necessary to re-solve the QP subproblem with the central difference gradient and Jacobian. |
| d |
during the linesearch it was necessary to decrease the step in order to obtain a maximum constraint violation conforming to the value of . |
| D |
you set on exit from objfun, indicating that the linesearch needed to be done with a smaller value of the step length . |
| l |
the norm wise change in the variables was limited by the value of the . If this output occurs repeatedly during later iterations, it may be worthwhile increasing the value of . |
| i |
if nag_opt_nlp_solve (e04wdc) is not in elastic mode, an i signifies that the QP subproblem is infeasible. This event triggers the start of nonlinear elastic mode, which remains in effect for all subsequent iterations. Once in elastic mode, the QP subproblems are associated with the elastic problem (11) (see Section 11.5).
If nag_opt_nlp_solve (e04wdc) is already in elastic mode, an i indicates that the minimizer of the elastic subproblem does not satisfy the linearized constraints. (In this case, a feasible point for the usual QP subproblem may or may not exist.) |
| M |
an extra evaluation of the problem functions was needed to define an acceptable positive definite quasi-Newton update to the Lagrangian Hessian. This modification is only done when there are nonlinear constraints. |
| m |
this is the same as M except that it was also necessary to modify the update to include an augmented Lagrangian term. |
| n |
no positive definite BFGS update could be found. The approximate Hessian is unchanged from the previous iteration. |
| R |
the approximate Hessian has been reset by discarding all but the diagonal elements. This reset will be forced periodically by the and keywords. However, it may also be necessary to reset an ill-conditioned Hessian from time to time. |
| r |
the approximate Hessian was reset after ten consecutive major iterations in which no BFGS update could be made. The diagonals of the approximate Hessian are retained if at least one update has been done since the last reset. Otherwise, the approximate Hessian is reset to the identity matrix. |
| s |
a self-scaled BFGS update was performed. This update is used when the Hessian approximation is diagonal, and hence always follows a Hessian reset. |
| t |
the minor iterations were terminated because of the . |
| T |
the minor iterations were terminated because of the . |
| u |
the QP subproblem was unbounded. |
| w |
a weak solution of the QP subproblem was found. |
| z |
the was reached. |
13.2 Minor Iteration Log
If , one line of information is output to the Print file every th minor iteration, where is the specified . A heading is printed before the first such line following a basis factorization. The heading contains the items described below. In this description, a pricing operation is the process by which a nonbasic variable is selected to become superbasic (in addition to those already in the superbasic set). The selected variable is denoted by jq. Variable jq often becomes basic immediately. Otherwise it remains superbasic, unless it reaches its opposite bound and returns to the nonbasic set.
If
is in effect, variable
jq is selected from
or
, the
th segments of the constraint matrix
.
| Label |
Description |
| Itn |
the current iteration number. |
| LPmult or QPmult |
is the reduced cost (or reduced gradient) of the variable jq selected by the pricing procedure at the start of the present iteration. Algebraically, the reduced gradient is for , where is the gradient of the current objective function, is the vector of dual variables for the QP subproblem, and is the th column of .
Note that the reduced cost is the -norm of the reduced-gradient vector at the start of the iteration, just after the pricing procedure. |
| LPstep or QPstep |
is the step length taken along the current search direction . The variables have just been changed to . Write Step to stand for LPStep or QPStep, depending on the problem. If a variable is made superbasic during the current iteration (), Step will be the step to the nearest bound. During the solution of (11), the step can be greater than one only if the reduced Hessian is not positive definite. |
| nInf |
is the number of infeasibilities after the present iteration. This number will not increase unless the iterations are in elastic mode. |
| SumInf |
is the sum of infeasibilities after the present iteration, if . The value usually decreases at each nonzero Step, but if it decreases by or more, SumInf may occasionally increase. |
| rgNorm |
is the norm of the reduced-gradient vector at the start of the iteration. (It is the norm of the vector with elements for variables in the superbasic set.) During the solution of subproblem (11) this norm will be approximately zero after a unit step. (The heading is not printed if the problem is linear.) |
| LPobjective, QPobjective or Elastic QPobj |
the QP objective function after the present iteration. In elastic mode, the heading is changed to Elastic QPobj. In either case, the value printed decreases monotonically. |
| +SBS |
is the variable jq selected by the pricing operation to be added to the superbasic set. |
| -SBS |
is the superbasic variable chosen to become nonbasic. |
| -BS |
is the basis variable removed (if any) to become nonbasic. |
| Pivot |
if column replaces the th column of the basis , Pivot is the th element of a vector satisfying . Wherever possible, Step is chosen to avoid extremely small values of Pivot (since they cause the basis to be nearly singular). In rare cases, it may be necessary to increase the to exclude very small elements of from consideration during the computation of Step. |
| L+U |
is the number of nonzeros representing the basis factors and . Immediately after a basis factorization , L+U is lenL+lenU, the number of subdiagonal elements in the columns of a lower triangular matrix and the number of diagonal and superdiagonal elements in the rows of an upper-triangular matrix. Further nonzeros are added to L when various columns of are later replaced. As columns of are replaced, the matrix is maintained explicitly (in sparse form). The value of L will steadily increase, whereas the value of U may fluctuate up or down. Thus the value of L+U may fluctuate up or down (in general, it will tend to increase). |
| ncp |
is the number of compressions required to recover storage in the data structure for . This includes the number of compressions needed during the previous basis factorization. |
| nS |
is the current number of superbasic variables. (The heading is not printed if the problem is linear.) |
| condHz |
see Section 13.1. (The heading is not printed if the problem is linear.) |
13.3 Crash Statistics
If
and
has been specified, the following items are output to the Print file when
and no Backup Basis file is loaded. They refer to the number of columns that the Crash procedure selects during selected passes through
while searching for a triangular basis matrix.
| Label |
Description |
| Slacks |
is the number of slacks selected initially. |
| Free cols |
is the number of free columns in the basis. |
| Preferred |
is the number of ‘preferred’ columns in the basis (i.e., for some ). |
| Unit |
is the number of unit columns in the basis. |
| Double |
is the number of columns in the basis containing nonzeros. |
| Triangle |
is the number of triangular columns in the basis. |
| Pad |
is the number of slacks used to pad the basis (to make it a nonsingular triangle). |
13.4 Basis Factorization Statistics
If
, the first seven items in the list below are output to the Print file whenever the basis
or the rectangular matrix
is factorized before solution of the next QP subproblem. See
Section 12.1 for a full description of an optional argument.
Gaussian elimination is used to compute a sparse factorization of or , where and are lower and upper triangular matrices for some permutation matrices and . Stability is ensured as described under the optional argument .
If
, the same items are printed during the QP solution whenever the current
is factorized. In addition, if
has been specified, the entries from
Elems onwards are also printed.
| Label |
Description |
| Factor |
the number of factorizations since the start of the run. |
| Demand |
a code giving the reason for the present factorization, as follows:
| Code |
Meaning |
| 0 |
First factorization. |
| 1 |
The number of updates reached the . |
| 2 |
The nonzeros in the updated factors have increased significantly. |
| 7 |
Not enough storage to update factors. |
| 10 |
Row residuals too large (see the description of the optional argument ). |
| 11 |
Ill-conditioning has caused inconsistent results. |
|
| Itn |
is the current minor iteration number. |
| Nonlin |
is the number of nonlinear variables in the current basis . |
| Linear |
is the number of linear variables in . |
| Slacks |
is the number of slack variables in . |
| B BR BS or BT factorize |
is the type of factorization.
| B |
periodic factorization of the basis . |
| BR |
more careful rank-revealing factorization of using threshold rook pivoting. This occurs mainly at the start, if the first basis factors seem singular or ill-conditioned. Followed by a normal B factorize. |
| BS |
is factorized to choose a well-conditioned from the current . Followed by a normal B factorize. |
| BT |
same as BS except the current is tried first and accepted if it appears to be not much more ill-conditioned than after the previous BS factorize. |
|
| m |
is the number of rows in or . |
| n |
is the number of columns in or . Preceded by ‘=’ or ‘>’ respectively. |
| Elems |
is the number of nonzero elements in or . |
| Amax |
is the largest nonzero in or . |
| Density |
is the percentage nonzero density of or . |
| Merit/MerRP/MerCP |
is the average Markowitz merit count for the elements chosen to be the diagonals of . Each merit count is defined to be where and are the number of nonzeros in the column and row containing the element at the time it is selected to be the next diagonal. Merit is the average of n such quantities. It gives an indication of how much work was required to preserve sparsity during the factorization. If or has been selected, this heading is changed to MerCP, respectively MerRP. |
| lenL |
is the number of nonzeros in . |
| L+U |
is the number of nonzeros representing the basis factors and . Immediately after a basis factorization , L+U is lenL+lenU, the number of subdiagonal elements in the columns of a lower triangular matrix and the number of diagonal and superdiagonal elements in the rows of an upper-triangular matrix. Further nonzeros are added to L when various columns of are later replaced. As columns of are replaced, the matrix is maintained explicitly (in sparse form). The value of L will steadily increase, whereas the value of U may fluctuate up or down. Thus the value of L+U may fluctuate up or down (in general, it will tend to increase). |
| Cmpressns |
is the number of times the data structure holding the partially factored matrix needed to be compressed to recover unused storage. Ideally this number should be zero. If it is more than or , the amount of workspace available to nag_opt_nlp_solve (e04wdc) should be increased for efficiency. |
| Incres |
is the percentage increase in the number of nonzeros in and relative to the number of nonzeros in or . |
| Utri |
is the number of triangular rows of or at the top of . |
| lenU |
the number of nonzeros in , including its diagonals. |
| Ltol |
is the largest subdiagonal element allowed in . This is the specified or a smaller value that is currently being used for greater stability. |
| Umax |
the maximum nonzero element in . |
| Ugrwth |
is the ratio , which ideally should not be substantially larger than or . If it is orders of magnitude larger, it may be advisable to reduce the to , , or , say (but bigger than ).
As long as Lmax is not large (say or less), gives an estimate of the condition number . If this is extremely large, the basis is nearly singular. Slacks are used to replace suspect columns of and the modified basis is refactored. |
| Ltri |
is the number of triangular columns of or at the left of . |
| dense1 |
is the number of columns remaining when the density of the basis matrix being factorized reached . |
| Lmax |
is the actual maximum subdiagonal element in (bounded by Ltol). |
| Akmax |
is the largest nonzero generated at any stage of the factorization. (Values much larger than Amax indicate instability.) Akmax is not printed if is selected. |
| Agrwth |
is the ratio . Values much larger than (say) indicate instability. Growth is not printed if is selected. |
| bump |
is the size of the block to be factorized nontrivially after the triangular rows and columns of or have been removed. |
| dense2 |
is the number of columns remaining when the density of the basis matrix being factorized reached . (The Markowitz pivot strategy searches fewer columns at that stage.) |
| DUmax |
is the largest diagonal of . |
| DUmin |
is the smallest diagonal of . |
| condU |
the ratio , which estimates the condition number of (and of if Ltol is less than , say). |
13.5 The Solution File
At the end of a run, the final solution may be output as a Solution file, according to . Some header information appears first to identify the problem and the final state of the optimization procedure. A ROWS section and a COLUMNS section then follow, giving one line of information for each row and column. The format used is similar to certain commercial systems, though there is no industry standard.
The maximum record length is characters.
To reduce clutter, a full stop (.) is printed for any numerical value that is exactly zero. The values are also printed specially as and . Infinite bounds ( or larger) are printed as None.
A Solution file is intended to be read from disk by a self-contained program that extracts and saves certain values as required for possible further computation. Typically, the first records would be ignored. Each subsequent record may be read
. The end of the ROWS section is marked by a record that starts with a and is otherwise blank. If this and the next records are skipped, the COLUMNS section can then be read under the same format.
13.5.1 The ROWS section
General linear constraints take the form
. The
th constraint is therefore of the form
where
is the
th row of
.
Internally, the constraints take the form
, where
is the set of slack variables (which happen to satisfy the bounds
). For the
th constraint it is the slack variable
that is directly available, and it is sometimes convenient to refer to its state. Nonlinear constraints
are treated similarly, except that the row activity and degree of infeasibility are computed directly from
rather than
. A fullstop (.) is printed for any numerical value that is exactly zero.
| Label |
Description |
| Number |
is the value of . (This is used internally to refer to in the intermediate output.)
|
| Row |
gives the name of the th row.
|
| State |
the state of the th row relative to the bounds and . The various states possible are as follows:
| LL |
the row is at its lower limit, . |
| UL |
the row is at its upper limit, . |
| EQ |
the limits are the same (). |
| FR |
is nonbasic and currently zero, even though it is free to take any value between its bounds and . |
| BS |
is basic. |
| SBS |
is superbasic. |
A key is sometimes printed before State.
Note that unless the optional argument is specified, the tests for assigning a key are applied to the variables of the scaled problem.
| A |
Alternative optimum possible. The variable is nonbasic, but its reduced gradient is essentially zero. This means that if the variable were allowed to start moving away from its bound, there would be no change in the value of the objective function. The values of the other free variables might change, giving a genuine alternative solution. However, if there are any degenerate variables (labelled D), the actual change might prove to be zero, since one of them could encounter a bound immediately. In either case, the values of the Lagrange multipliers might also change.
|
| D |
Degenerate. The variable is basic or superbasic, but it is equal (or very close) to one of its bounds.
|
| I |
Infeasible. The variable is basic or superbasic and is currently violating one of its bounds by more than the value of the .
|
| N |
Not precisely optimal. The variable is nonbasic or superbasic. If the value of the reduced gradient for the variable exceeds the value of the optional argument , the solution would not be declared optimal because the reduced gradient for the variable would not be considered negligible.
|
|
| Activity |
is the value of (or for nonlinear rows) at the final iterate. |
| Slack Activity |
is the value by which the row differs from its nearest bound. (For the free row (if any), it is set to Activity.)
|
| Lower Limit |
is , the lower bound on the row. |
| Upper Limit |
is , the upper bound on the row. |
| Dual Activity |
is the value of the dual variable (the Lagrange multiplier for the th constraint). The full vector always satisfies , where is the current basis matrix and contains the associated gradients for the current objective function. For FP problems, is set to zero. |
| i |
gives the index of the th row.
|
13.5.2 The COLUMNS section
Let the
th component of
be the variable
and assume that it satisfies the bounds
. A fullstop (.) is printed for any numerical value that is exactly zero.
| Label |
Description |
| Number |
is the column number . (This is used internally to refer to in the intermediate output.)
|
| Column |
gives the name of .
|
| State |
the state of relative to the bounds and . The various states possible are as follows:
| LL |
is nonbasic at its lower limit, . |
| UL |
is nonbasic at its upper limit, . |
| EQ |
is nonbasic and fixed at the value . |
| FR |
is nonbasic at some value strictly between its bounds: . |
| BS |
is basic. Usually . |
| SBS |
is superbasic. Usually . |
A key is sometimes printed before State.
Note that unless the optional argument is specified, the tests for assigning a key are applied to the variables of the scaled problem.
| A |
Alternative optimum possible. The variable is nonbasic, but its reduced gradient is essentially zero. This means that if the variable were allowed to start moving away from its bound, there would be no change in the value of the objective function. The values of the other free variables might change, giving a genuine alternative solution. However, if there are any degenerate variables (labelled D), the actual change might prove to be zero, since one of them could encounter a bound immediately. In either case, the values of the Lagrange multipliers might also change.
|
| D |
Degenerate. The variable is basic or superbasic, but it is equal (or very close) to one of its bounds.
|
| I |
Infeasible. The variable is basic or superbasic and is currently violating one of its bounds by more than the value of the .
|
| N |
Not precisely optimal. The variable is nonbasic or superbasic. If the value of the reduced gradient for the variable exceeds the value of the optional argument , the solution would not be declared optimal because the reduced gradient for the variable would not be considered negligible. |
|
| Activity |
is the value of at the final iterate.
|
| Obj Gradient |
is the value of at the final iterate. For FP problems, is set to zero.
|
| Lower Limit |
is the lower bound specified for the variable. None indicates that . |
| Upper Limit |
is the upper bound specified for the variable. None indicates that . |
| Reduced Gradnt |
is the value of the reduced gradient where is the th column of the constraint matrix. For FP problems, is set to zero. |
| m + j |
is the value of .
|
Note that movement off a constraint (as opposed to a variable moving away from its bound) can be interpreted as allowing the entry in the Slack Activity column to become positive.
Numerical values are output with a fixed number of digits; they are not guaranteed to be accurate to this precision.
13.6 The Summary File
If
,
the following information is output to the
. (It is a brief summary of the output directed to unit
):
| – |
the optional arguments supplied via the option setting functions, if any; |
| – |
the Basis file loaded, if any; |
| – |
a brief major iteration log (see Section 13.1); |
| – |
a brief minor iteration log (see Section 13.2); |
| – |
the exit condition, fail; |
| – |
a summary of the final iterate. |