nag_pde_1d_parab_euler_exact (d03px) calculates a numerical flux function using an Exact Riemann Solver for the Euler equations in conservative form. It is designed primarily for use with the upwind discretization schemes
nag_pde_1d_parab_convdiff (d03pf),
nag_pde_1d_parab_convdiff_dae (d03pl) or
nag_pde_1d_parab_convdiff_remesh (d03ps), but may also be applicable to other conservative upwind schemes requiring numerical flux functions.
nag_pde_1d_parab_euler_exact (d03px) calculates a numerical flux function at a single spatial point using an Exact Riemann Solver (see
Toro (1996) and
Toro (1989)) for the Euler equations (for a perfect gas) in conservative form. You must supply the
left and
right solution values at the point where the numerical flux is required, i.e., the initial left and right states of the Riemann problem defined below. In
nag_pde_1d_parab_convdiff (d03pf),
nag_pde_1d_parab_convdiff_dae (d03pl) and
nag_pde_1d_parab_convdiff_remesh (d03ps), the left and right solution values are derived automatically from the solution values at adjacent spatial points and supplied to the function argument
numflx from which you may call
nag_pde_1d_parab_euler_exact (d03px).
The Euler equations for a perfect gas in conservative form are:
with
where
is the density,
is the momentum,
is the specific total energy and
is the (constant) ratio of specific heats. The pressure
is given by
where
is the velocity.
The function calculates the numerical flux function
, where
and
are the left and right solution values, and
is the intermediate state
arising from the similarity solution
of the Riemann problem defined by
with
and
as in
(2), and initial piecewise constant values
for
and
for
. The spatial domain is
, where
is the point at which the numerical flux is required.
The algorithm is termed an Exact Riemann Solver although it does in fact calculate an approximate solution to a true Riemann problem, as opposed to an Approximate Riemann Solver which involves some form of alternative modelling of the Riemann problem. The approximation part of the Exact Riemann Solver is a Newton–Raphson iterative procedure to calculate the pressure, and you must supply a tolerance
tol and a maximum number of iterations
niter. Default values for these arguments can be chosen.
A solution cannot be found by this function if there is a vacuum state in the Riemann problem (loosely characterised by zero density), or if such a state is generated by the interaction of two non-vacuum data states. In this case a Riemann solver which can handle vacuum states has to be used (see
Toro (1996)).
Toro E F (1989) A weighted average flux method for hyperbolic conservation laws Proc. Roy. Soc. Lond. A423 401–418
None.
The algorithm is exact apart from the calculation of the pressure which uses a Newton–Raphson iterative procedure, the accuracy of which is controlled by the argument
tol. In some cases the initial guess for the Newton–Raphson procedure is exact and no further iterations are required.
nag_pde_1d_parab_euler_exact (d03px) must only be used to calculate the numerical flux for the Euler equations in exactly the form given by
(2), with
and
containing the left and right values of
and
, for
, respectively.
For some problems the function may fail or be highly inefficient in comparison with an Approximate Riemann Solver (e.g.,
nag_pde_1d_parab_euler_roe (d03pu),
nag_pde_1d_parab_euler_osher (d03pv) or
nag_pde_1d_parab_euler_hll (d03pw)). Hence it is advisable to try more than one Riemann solver and to compare the performance and the results.
The time taken by the function is independent of all input arguments other than
tol.
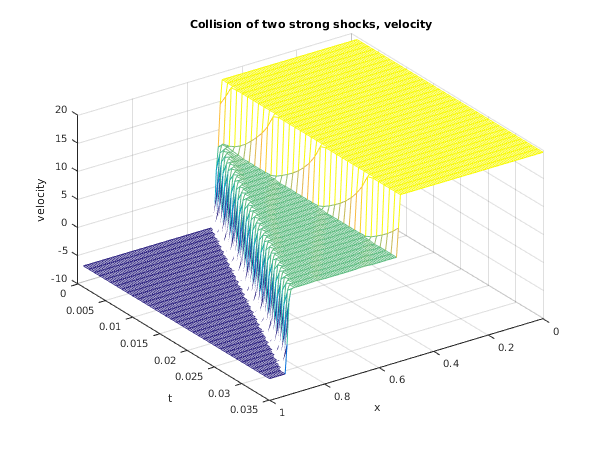
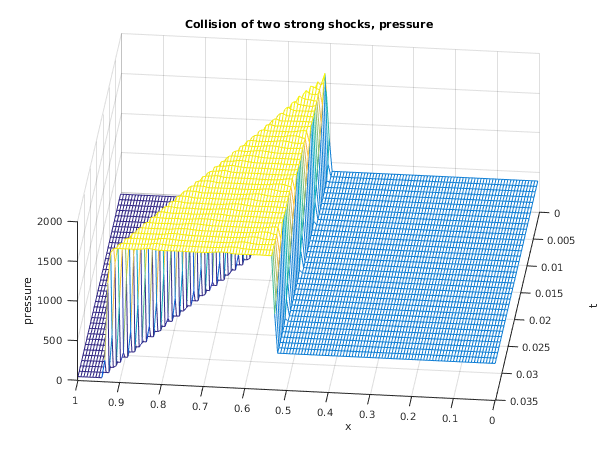
This example uses
nag_pde_1d_parab_convdiff_dae (d03pl) and
nag_pde_1d_parab_euler_exact (d03px) to solve the Euler equations in the domain
for
with initial conditions for the primitive variables
,
and
given by
This test problem is taken from
Toro (1996) and its solution represents the collision of two strong shocks travelling in opposite directions, consisting of a left facing shock (travelling slowly to the right), a right travelling contact discontinuity and a right travelling shock wave. There is an exact solution to this problem (see
Toro (1996)) but the calculation is lengthy and has therefore been omitted.
function d03px_example
fprintf('d03px example results\n\n');
global gamma rl0 rr0 ul0 ur0 el0 er0;
alpha_l = 460.894;
alpha_r = 46.095;
beta_l = 19.5975;
beta_r = 6.19633;
gamma = 1.4;
rl0 = 5.99924;
rr0 = 5.99242;
ul0 = 117.5701059;
ur0 = -37.1310118186;
el0 = alpha_l/(gamma-1) + rl0*beta_l^2/2;
er0 = alpha_r/(gamma-1) + rr0*beta_r^2/2;
npde = int64(3);
npts = int64(141);
ncode = int64(0);
nxi = int64(0);
neqn = npde*npts+ncode;
ts = 0;
xi = [];
itol = int64(1);
atol = [0.005];
rtol = [0.0005];
norm_p = '2';
laopt = 'B';
algopt = zeros(30,1);
algopt(1) = 2;
algopt(6) = 2;
algopt(7) = 2;
algopt(13) = 0.005;
rsave = zeros(21000, 1);
isave = zeros(25700, 1, 'int64');
itask = int64(1);
itrace = int64(0);
ind = int64(0);
dx = 1/(double(npts)-1);
x = [0:dx:1];
u = uvinit(x);
u1sol = zeros(35,npts);
u2sol = zeros(35,npts);
u3sol = zeros(35,npts);
xsol = zeros(35,npts);
tsol = zeros(35,npts);
for j=1:35
tout = 0.001*j;
[ts, u, rsave, isave, ind, ifail] = ...
d03pl( ...
npde, ts, tout, 'd03plp', @numflx, @bndary, u, x, ncode, ...
'd03pek', xi, rtol, atol, itol, norm_p, laopt, ...
algopt, rsave, isave, itask, itrace, ind,'nxi',nxi);
xsol(j,:) = x;
tsol(j,:) = ts;
u1sol(j,:) = u(1,:);
u2sol(j,:) = u(2,:)./u(1,:);
u3sol(j,:) = 0.4*u(1,:).*(u(3,:)./u(1,:)-u2sol(j,:).^2/2);
end
nsteps = 50*((isave(1)+25)/50);
nfuncs = 50*((isave(2)+25)/50);
njacs = isave(3);
niters = isave(5);
fprintf('\n Number of time steps (nearest 50) = %6d\n',nsteps);
fprintf(' Number of function evaluations (nearest 50) = %6d\n',nfuncs);
fprintf(' Number of Jacobian evaluations (nearest 1) = %6d\n',njacs);
fprintf(' Number of iterations (nearest 1) = %6d\n',niters);
fig1=figure;
mesh(xsol,tsol,u1sol);
title('Collision of two strong shocks, density');
xlabel('x');
ylabel('t');
zlabel('density');
view(182,40);
fig2=figure;
mesh(xsol,tsol,u2sol);
title('Collision of two strong shocks, velocity');
xlabel('x');
ylabel('t');
zlabel('velocity');
view(145,40);
fig3=figure;
mesh(xsol,tsol,u3sol);
title('Collision of two strong shocks, pressure');
xlabel('x');
ylabel('t');
zlabel('pressure');
view(-174,50);
function [g, iresout] = bndary(npde, npts, t, x, u, ncode, ...
v, vdot, ibnd, ires)
global rl0 rr0 ul0 ur0 el0 er0;
if (ibnd == 0)
g(1) = u(1,1) - rl0;
g(2) = u(2,1) - ul0;
g(3) = u(3,1) - el0;
else
g(1) = u(1,npts) - rr0;
g(2) = u(2,npts) - ur0;
g(3) = u(3,npts) - er0;
end
iresout = ires;
function [flux, ires] = numflx(npde, t, x, ncode, v, uleft, uright, ires)
global gamma;
tol = 0;
niter = int64(0);
[flux, ifail] = d03px( ...
uleft, uright, gamma, tol, niter);
function [u] = uvinit(x)
global rl0 rr0 ul0 ur0 el0 er0;
n = size(x,2);
u = zeros(3,n);
for i = 1:n
if x(i)<1/2
u(1,i) = rl0;
u(2,i) = ul0;
u(3,i) = el0;
elseif x(i)== 1/2
u(1,i) = (rl0+rr0)/2;
u(2,i) = (ul0+ur0)/2;
u(3,i) = (el0+er0)/2;
else
u(1,i) = rr0;
u(2,i) = ur0;
u(3,i) = er0;
end
end