NAG Library Routine Document
S17ARF
1 Purpose
S17ARF returns an array of values of the Bessel function .
2 Specification
| INTEGER |
N, IVALID(N), IFAIL |
| REAL (KIND=nag_wp) |
X(N), F(N) |
|
3 Description
S17ARF evaluates an approximation to the Bessel function of the second kind for an array of arguments , for .
Note: is undefined for and the routine will fail for such arguments.
The routine is based on four Chebyshev expansions:
For
,
where
,
and , with .
For near zero, . This approximation is used when is sufficiently small for the result to be correct to machine precision. For extremely small , there is a danger of overflow in calculating and for such arguments the routine will fail.
For very large
, it becomes impossible to provide results with any reasonable accuracy (see
Section 7), hence the routine fails. Such arguments contain insufficient information to determine the phase of oscillation of
; only the amplitude,
, can be determined and this is returned on soft failure. The range for which this occurs is roughly related to
machine precision; the routine will fail if
(see the
Users' Note for your implementation for details).
4 References
Abramowitz M and Stegun I A (1972) Handbook of Mathematical Functions (3rd Edition) Dover Publications
Clenshaw C W (1962) Chebyshev Series for Mathematical Functions Mathematical tables HMSO
5 Parameters
- 1: N – INTEGERInput
On entry: , the number of points.
Constraint:
.
- 2: X(N) – REAL (KIND=nag_wp) arrayInput
On entry: the argument of the function, for .
Constraint:
, for .
- 3: F(N) – REAL (KIND=nag_wp) arrayOutput
On exit: , the function values.
- 4: IVALID(N) – INTEGER arrayOutput
On exit:
contains the error code for
, for
.
- No error.
| On entry, | is too large. contains the amplitude of the oscillation, . |
| On entry, | , is undefined. contains . |
- is too close to zero, there is a danger of overflow. On soft failure, contains the value of at the smallest valid argument.
- 5: IFAIL – INTEGERInput/Output
-
On entry:
IFAIL must be set to
,
. If you are unfamiliar with this parameter you should refer to
Section 3.3 in the Essential Introduction for details.
For environments where it might be inappropriate to halt program execution when an error is detected, the value
is recommended. If the output of error messages is undesirable, then the value
is recommended. Otherwise, if you are not familiar with this parameter, the recommended value is
.
When the value is used it is essential to test the value of IFAIL on exit.
On exit:
unless the routine detects an error or a warning has been flagged (see
Section 6).
6 Error Indicators and Warnings
If on entry
or
, explanatory error messages are output on the current error message unit (as defined by
X04AAF).
Errors or warnings detected by the routine:
-
On entry, at least one value of
X was invalid.
Check
IVALID for more information.
-
On entry, .
Constraint: .
7 Accuracy
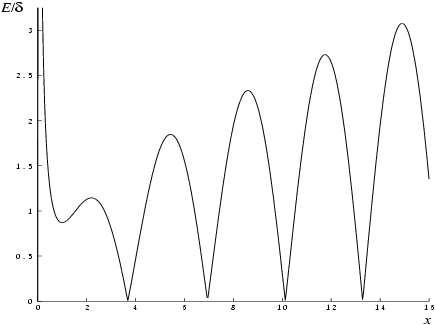
Let be the relative error in the argument and be the absolute error in the result. (Since oscillates about zero, absolute error and not relative error is significant, except for very small .)
If
is somewhat larger than the
machine precision (e.g., if
is due to data errors etc.), then
and
are approximately related by:
(provided
is also within machine bounds).
Figure 1 displays the behaviour of the amplification factor
.
However, if is of the same order as machine precision, then rounding errors could make slightly larger than the above relation predicts.
For very small , absolute error becomes large, but the relative error in the result is of the same order as .
For very large , the above relation ceases to apply. In this region, . The amplitude can be calculated with reasonable accuracy for all , but cannot. If is written as where is an integer and , then is determined by only. If , cannot be determined with any accuracy at all. Thus if is greater than, or of the order of, the inverse of the machine precision, it is impossible to calculate the phase of and the routine must fail.
None.
9 Example
This example reads values of
X from a file, evaluates the function at each value of
and prints the results.
9.1 Program Text
Program Text (s17arfe.f90)
9.2 Program Data
Program Data (s17arfe.d)
9.3 Program Results
Program Results (s17arfe.r)