None.
Open in the MATLAB editor: d02pz_example
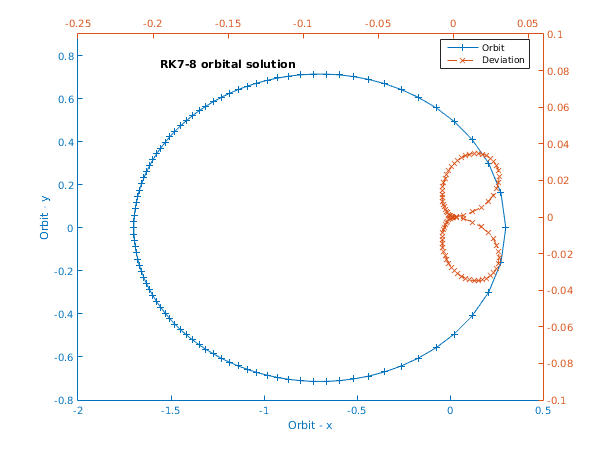
function d02pz_example fprintf('d02pz example results\n\n'); % Initialize variables and arrays. neq = int64(4); lenwrk = int64(32*neq); method = int64(3); ecc = 0.7; tstart = 0.0; ystart = [1.0-ecc; 0.0; 0.0; sqrt((1.0+ecc)/(1.0-ecc))]; tend = 3.0*pi; thres = [1e-10; 1e-10; 1e-10; 1e-10]; task = 'Usual Task'; % tell d02pv to use d02pc. errass = true; hstart = 0.0; tol = 1.0e-6; % We run through the calculation twice: once to output the results at % a single point, and again to accumulate a series of results for plotting. nstep = [1; 90]; tend = [3.0*pi; 2.0*pi]; % Prepare to accumulate results. The first and last points should be the % same - i.e. so the plot shows a closed trajectory. xarray = zeros(nstep(2)+1, 1); yarray = zeros(nstep(2)+1, 4); for icalc = 1:2 tinc = tend(icalc)/nstep(icalc); if icalc == 1 % Output initial results. fprintf('Calculation with tol = %1.1e\n\n',tol); fprintf(' t y1 y2 y3 y4\n'); fprintf(' %6.3f', tstart); fprintf(' %8.4f', ystart(1:neq)); fprintf('\n'); else xarray(1) = tstart; yarray(1, 1:neq) = ystart(1:neq); end for istep = 1:nstep(icalc) twant = istep*tinc; % d02pv is a setup routine to be called prior to d02pc. [work, ifail] = d02pv( ... tstart, ystart, twant, tol, thres, method, ... task, errass, lenwrk, 'neq', neq, 'hstart', hstart); % Initialize ygot and ymax. These values don't matter for the % first call of d02pc, but they mustn't be changed in between % calls for the same problem. ygot = ystart; ymax = ystart; % In this demo, we disregard warnings about inefficiency from % d02pc (i.e. ifail = 2,3 or 4 - see documentation) and keep % calling the routine until the end of the range is reached. ifail = 2; while ifail >= 2 && ifail <= 4 [tgot, ygot, ypgot, ymax, work, ifail] = ... d02pc( ... @f, neq, twant, ygot, ymax, work); end % Store the current result. if icalc == 2 xarray(istep+1) = tgot; for ieq = 1:neq yarray(istep+1, ieq) = ygot(ieq); end end end % Output final results. if icalc == 1 fprintf(' %6.3f', tgot); fprintf(' %8.4f', ygot(1:neq)); fprintf('\n'); % d02pz provides details about global error assessment computed % during integration with d02pc (or d02pd). [rmserr, errmax, terrmx, ifail] = ... d02pz(neq, work); fprintf('\nComponentwise error assessment:\n '); fprintf(' %9.2e', rmserr(1:neq)); fprintf('\n'); fprintf(['\nWorst global error observed was %9.2e', ... ' - it occurred at T = %6.3f\n'], errmax, terrmx); % d02py is a diagnostic routine. [totfcn, stpcst, waste, stpsok, hnext, ifail] = ... d02py; fprintf(['\nCost of the integration in evaluations of ', ... 'F is %1.0f\n\n\n'], totfcn); end end % Use the first two components of the solution, and calculate the deviation % from a true ellipse. x = yarray(:,1); y = yarray(:,2); xdev = zeros(nstep(2)+1, 1); ydev = zeros(nstep(2)+1, 1); for i = 1:nstep(2)+1 fac = abs((x(i) + ecc)*(x(i) + ecc) + y(i)*y(i)/(ecc*ecc) - 1.0); xdev(i) = fac*cos(xarray(i)); ydev(i) = fac*sin(xarray(i)); end % Plot results. fig1 = figure; display_plot(x, y, xdev, ydev); function [yp] = f(t, y, yp) % Evaluate derivative vector. yp = zeros(4, 1); r = sqrt((y(1)^2 + y(2)^2)); yp(1) = y(3); yp(2) = y(4); yp(3) = -y(1)/r^3; yp(4) = -y(2)/r^3; function display_plot(x1, y1, x2, y2) % Plot the results. First, get the list of default colours (we have to % specify the plot colours by hand). axes('XLim', [-2 0.5], 'YLim', [-0.8 0.9]); cols = get(gca, 'ColorOrder'); % Plot the first curve. hline1 = line(x1, y1, 'Color', cols(1,:)); ax1 = gca; set(ax1, 'XColor', cols(1,:), 'YColor', cols(1,:)); % Label these axes. xlabel('Orbit - x'); ylabel('Orbit - y'); % Set up the second set of axes and plot the second curve. ax2 = axes('Position', get(ax1,'Position'), ... 'XAxisLocation', 'top', 'YAxisLocation', 'right', ... 'Color','none', 'XColor',cols(2,:), 'YColor', cols(2,:), ... 'XLim', [-0.25 0.06], 'YLim', [-0.1 0.1]); hline2 = line(x2, y2, 'Color', cols(2,:), 'Parent', ax2); % Label these axes. h = title('RK7-8 orbital solution'); set(h,'Position',[-0.15,0.08]); % Add a legend, specifying the lines explicitly. legend([hline1, hline2],'Orbit','Deviation','Location','Best'); % Set some features of the two lines. set(hline1, 'Linewidth', 0.25, 'Marker', '+', 'LineStyle', '-'); set(hline2, 'Linewidth', 0.25, 'Marker', 'x', 'LineStyle', '--');
d02pz example results
Calculation with tol = 1.0e-06
t y1 y2 y3 y4
0.000 0.3000 0.0000 0.0000 2.3805
9.425 -1.7000 0.0000 -0.0000 -0.4201
Componentwise error assessment:
3.81e-06 7.10e-06 6.92e-06 2.10e-06
Worst global error observed was 3.43e-05 - it occurred at T = 6.302
Cost of the integration in evaluations of F is 1361